



CI
Communications industrielles
Les architectures d’automatismes ont très fortement évolué avec l’arrivée des nouvelles technologies de l’information et de la communication (NTIC).
Les bus et les réseaux de terrain sont de plus en plus nombreux, avec des automatismes basés sur des unités de traitement (automates industriels programmables : API).
On parle aujourd’hui de standards de communication.
Architectures d’automatismes
Automatismes centralisés
Les automatismes, s’appuyant sur des automates programmables industriels (API), traitaient essentiellement des fonctions séquentielles.
En simplifiant, les API :
– Géraient des demandes d’exécution et d’état de l’automatisme (image des entrées).
– Élaboraient des demandes d’exécution d’actions (positionnement des sorties).
Par la suite, les API ont été amenés à gérer de nombreuses fonctions complémentaires comme des fonctions métier, des fonctions de diagnostic système et application, etc.
Les automatismes centralisés géraient tout un ensemble de fonctions qui n’avaient pas forcement d’interactions entre elles.
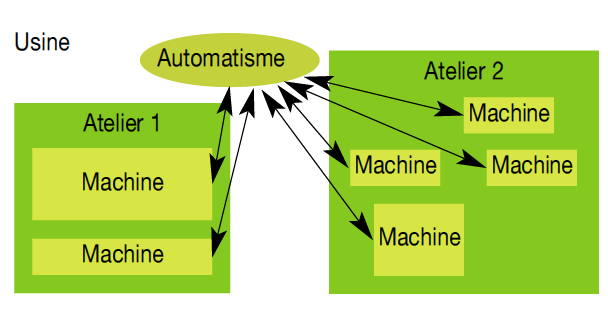
Lorsqu’il y avait déjà un automate dans l’usine, les automaticiens qui devaient intégrer une fonction supplémentaire se posaient simplement la question : l’automate ou le système d’automatisme en place peut-il gérer les E/S supplémentaires et quelle est la capacité de mémoire disponible ?
Bien souvent, l’automatisation supplémentaire était réalisée avec cet automate existant, même si elle n’avait aucun rapport avec l’automatisme résident.
Ces automatismes centralisés amenaient des nombreuses contraintes :
– Aucune autonomie des différents sous-ensembles.
– Mise en service et maintenance lourdes et difficiles à effectuer du fait de la quantité d’E/S gérées.
– Arrêt de l’ensemble des fonctions gérées par l’API en cas de défaut système de cet API ou d’arrêt pour la maintenance du moindre élément de l’outil de production.
Automatismes décentralisés
Du fait des contraintes imposées par les systèmes centralisés, les utilisateurs se sont orientés vers une segmentation de l’architecture. Celle-ci a été faite en découpant l’automatisme en entités fonctionnelles.
Elle permet de simplifier les automatismes en réduisant le nombre d’E/S gérées et présente donc l’avantage de faciliter la mise en service et la maintenance.
Cette segmentation a généré le besoin de communication entre les entités fonctionnelles.
La fonction de communication est devenue la clef de voûte de la conception des architectures d’automatismes.
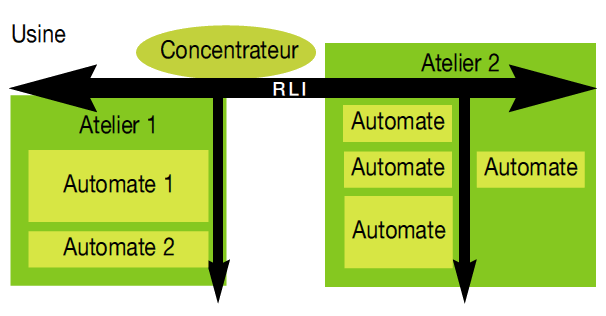
Les constructeurs d’API ont donc créé des offres de réseaux locaux industriels (RLI) afin d’assurer une communication efficace entre les différents API.
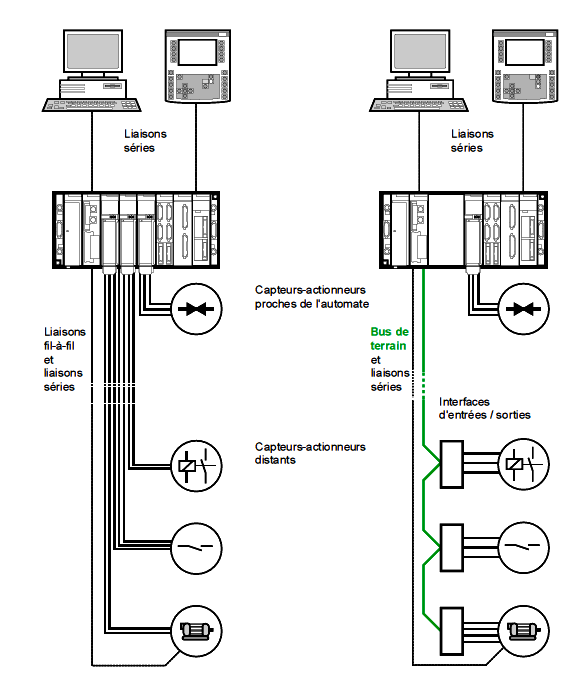
> La décentralisation des entrées/sorties et de la périphérie d’automatisme
A la demande des utilisateurs finaux, notamment pour faire baisser les coûts de câblage, il a été nécessaire de prendre en compte la topologie des automatismes.
Sur des sites plus étendus, il est souvent nécessaire de gérer un nombre de points diffus importants et de prendre en compte les fonctions métier réparties (variation de vitesse, dialogue homme/machine, pesage…).
La réponse des constructeurs de produits d’automatismes est arrivée avec les réseaux et bus de terrain. Ceux-ci ont permis de gérer dans un premier temps des E/S décentralisées puis la périphérie d’automatisme. Ces réseaux de terrain contribuent à réaliser des gains de câblage importants, mais surtout ils permettent de rendre accessibles des services (diagnostic, programmation…) sur tout le site.
Rôle de l’informatique dans les automatismes
Le besoin d’assurer une communication entre les mondes de l’informatique et de l’automatisme est devenu indispensable du fait de la nécessité d’augmenter la productivité des usines de fabrication.
Les réseaux locaux industriels d’automatismes propriétaires ont rapidement bénéficié des grands standards développés sur les architectures informatiques.
La communication entre ces deux mondes a d’abord été assurée par des liaisons série (RS), puis par des produits issus de partenariats entre les constructeurs d’automates programmables et les grands de l’informatique tels que IBM, HP, DEC.
Ces derniers ont proposé, dans leur catalogue, une offre de coupleurs RLI comme Ethway ou Uni-Telway.
La standardisation progressive d’Ethernet dans les deux mondes et une tentative de standardisation d’un protocole MMS (Manufacturing Message Specification) qui a été abandonné à cause de sa complexité.
Le CIM (Computer Integrated Manufacturing) crée une segmentation des réseaux et bus.
Les principes d’échanges sont construits autour du transfert vertical de l’information (vers les niveaux n+1) de manière irrationnelle, l’objectif étant de pouvoir disposer de cette information.
Le constat qui peut être fait est que l’information est souvent redondante donc peu légitime. Ce trop d’informations est la raison principale à la course à la performance sur les réseaux qui sont devenus en quelques années les goulets d’étranglement des architectures d’automatismes.
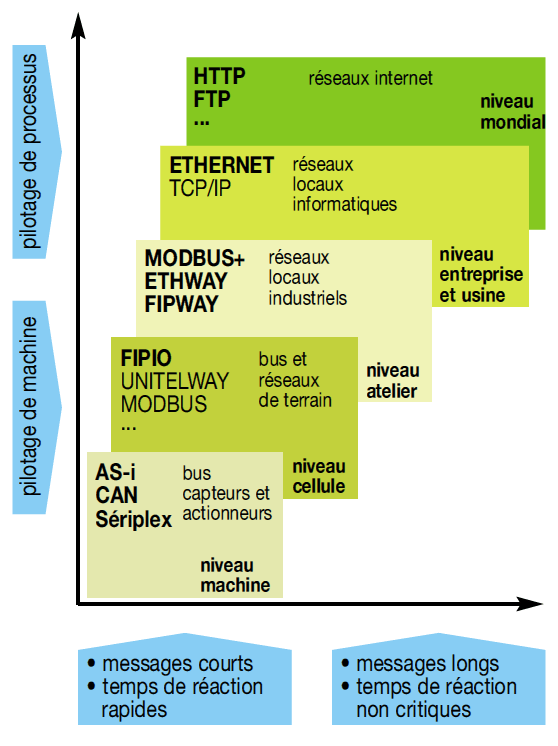
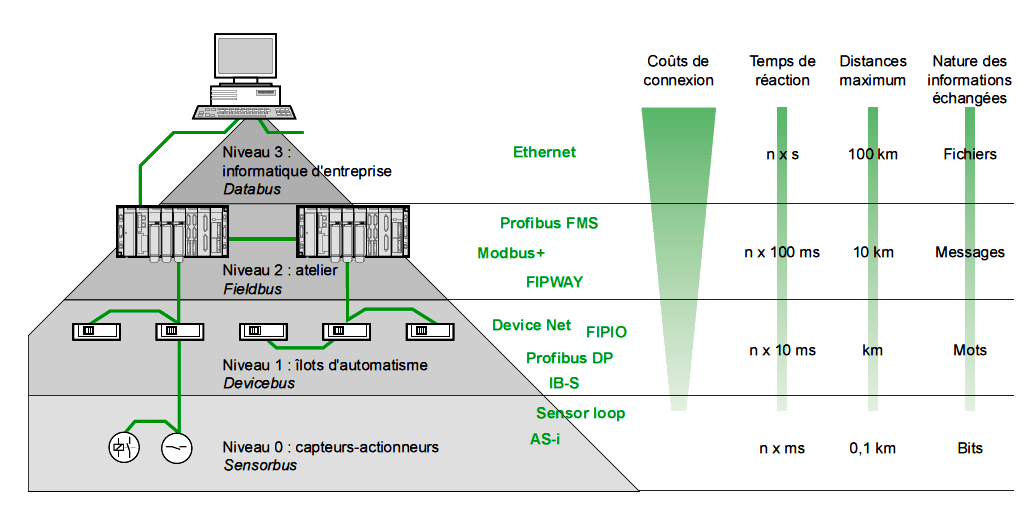
Le modèle CIM (Computer Integrated Manufacturing), qui se voulait être la réponse à cette quête de performance, n’a réussi qu’à créer une segmentation verticale des réseaux et des bus. Le CIM décrit les différents niveaux de communication sous une forme quantitative des données à véhiculer.
Le niveau 0, niveau capteur/actionneur, nécessite un transfert performant (quelques millisecondes) mais concernant peu d’informations (données binaires), alors que le niveau 4 nécessite quant à lui de véhiculer de gros paquets de données, des fichiers et la performance n’est plus forcément un critère prédominant.
Le CIM ne résout donc pas la problématique de la gestion de l’augmentation du trafic sur les médiums.
Les offreurs de communication adaptent les performances de leurs réseaux en fonction des niveaux du CIM sur lesquels ceux-ci seront positionnés. De ce fait, la quasi-totalité des réseaux d’automatismes sont dits propriétaires et répondent essentiellement en la mise en conformité d’une approche produit et non pas exactement de la problématique utilisateur qui est son besoin.
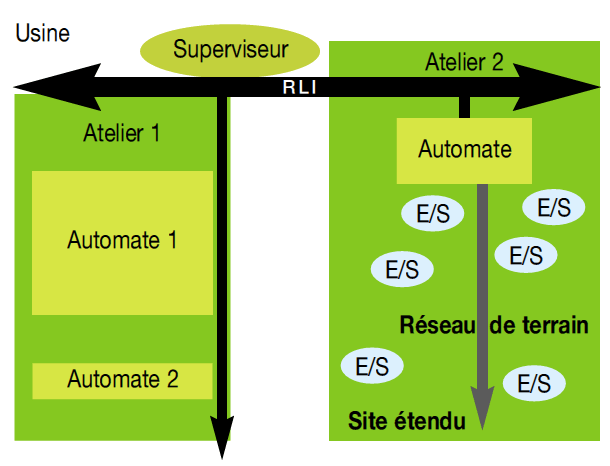
Le CIM a contribué à la segmentation de l’automatisme en niveaux : capteur/actionneur (niveau 0), automatisme (niveau 1), supervision (niveau 2), informatique (niveaux 3 et 4) en associant le couple volume/performance.
Les constructeurs d’automates programmables ont créé des réseaux et des bus adaptés au besoin.
Ainsi à chaque niveau, correspond un bus ou un réseau :
> Les “sensor bus”, bus capteurs et actionneurs unitaires simples.
> Les “device bus”, bus et réseaux pour la périphérie d’automatisme : variateurs, robots, axes…
> Les “field bus”, réseaux de communication entre unités de traitement : automates programmables, superviseurs, commandes numériques…
> les réseaux locaux industriels, pour l’établissement de la communication entre l’automatisme et le monde informatique.
Évolution de la communication
Avec l’adoption de standards communs la communication entre ces deux mondes converge grâce à l’adoption de protocoles standard mondiaux Ethernet et TCP/IP, mais aussi grâce à la prise en compte de mécanismes normés tels qu’OPC (OLE for Process Control).
Ces nouvelles technologies, associées aux Extranet, Intranet et Internet, autorisent un accès aux données de l’automatisme en temps réel, en tout lieu, à toute personne autorisée. Cette convergence est renforcée par l’arrivée de nombreux constituants d’automatismes basés sur cette technologie.
Ethernet TCP/IP s’est développé sur les architectures d’automatismes et est devenu un réseau fédérateur.
La généralisation de ce réseau autorise une prise en compte simple de nouveaux outils de conduite et d’exploitation des données : MES (Manufacturing Execution System) et ERP (Enterprise Ressource Planning).
Parallèlement à l’apparition du MES, les postes de supervision ont tendance à se repositionner au niveau de la conduite.
Dans la terminologie NTIC, il ne faut pas comprendre seulement l’utilisation d’Ethernet TCP/IP mais également les technologies et mécanismes éprouvés et usités dans le monde informatique tels que les langages JAVA, CORBA, HTML, XML mais également de nouvelles technologies issues du monde des télécommunications telles que WAP (Wireless Application Protocol), Bluetooth (universal serial bus BT-USB), WML (Wireless Markup Language), Zigbee…
Ainsi, les NTIC permettent :
– De repenser l’approche dans la conception des architectures d’automatismes.
– D’augmenter les capacités et les performances des réseaux de communication par le développement de nouveaux modèles de communication.
– De développer des services associés aux métiers des différents acteurs du procédé.
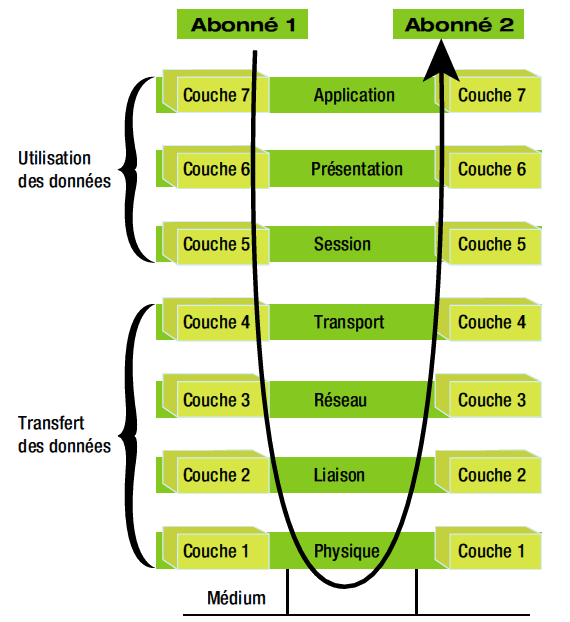
Le modèle OSI (Open System Interconnection)
Les couches Transport, Session et Présentation peuvent être vides. C’est ce qu’on nomme un profil simplifié, largement utilisé pour les réseaux industriels.
Fonctionnellement, l’ensemble des sept couches est divisible en deux familles bien distinctes la première, constituée des couches 1 à 4, offre les services de communication (transfert des données), la seconde constituée des couches 5 à 7, les services d’application (utilisation des données).
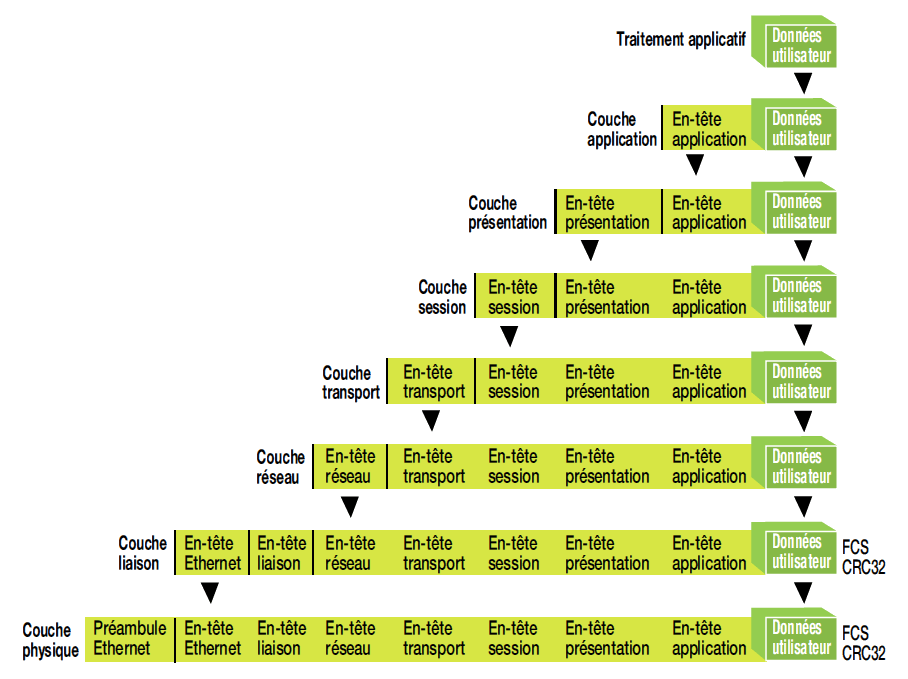
L’encapsulation
C’est un mécanisme de transmission de données.
Lorsqu’une application envoie des données vers le réseau, chaque couche traversée exécute un processus d’encapsulation de l’unité de données fournie par la couche supérieure en ajoutant une entête, voire une remorque, qui lui est propre.
Réciproquement à la réception, chaque couche exécutera une désencapsulation pour en final ne restituer que les données utilisateurs à l’application.
Topologies des réseaux
La topologie d’un réseau est caractérisée par le système de câblage du réseau ; c’est la partie physique du réseau :
> Point à point
C’est la forme la plus élémentaire qui implique deux machines. Elle correspondra souvent à la topologie d’une partie d’un réseau.
En général, cela concerne une liaison série dont les vitesses sont vite limitées par la distance, l’utilisation de la fibre optique pouvant compenser cette faiblesse.
> Étoile
Une approche ancienne, non normalisée, correspondait à une organisation de machines esclaves reliées par liaisons point à point à une machine maître. Aujourd’hui cette topologie correspond soit au câblage par étoile passive soit à celui d’un autocommutateur privé (PABX) ou à un Hub (équipement statique qui simule un réseau local auquel sont raccordés des abonnés par dérivations, certains hubs pouvant être raccordés à un réseau principal).
Le nœud central n’est pas un abonné du réseau mais une unité de distribution dont le bon fonctionnement est indispensable à la communication. Cette dernière correspond à une partie de réseau (exemple des PC familiaux rattachés à un serveur Internet ou à un réseau local de stations connectées à un serveur), dans la mesure où les équipements sont peu nombreux car le coût de câblage devient vite prohibitif et les performances douteuses.
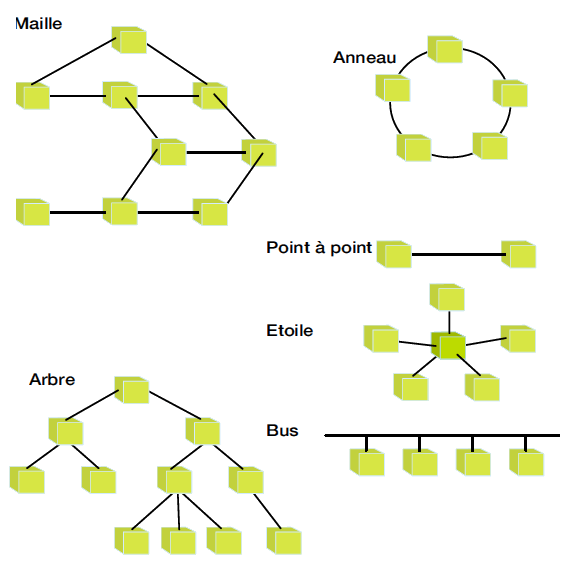
> Bus
C’est la topologie la plus commune aux LAN (Local Access Network) car la plus économique. Chaque nœud est raccordé au bus par l’intermédiaire de modules de dérivation actifs ou passifs suivant le protocole de réseau.
> Arbre
Chaque nœud peut être un abonné ou un hub. C’est une variante de la topologie en étoile avec les mêmes faiblesses. Cette architecture revient en force avec les techniques du type Ethernet en fibre optique 10 base F et Ethernet commuté du type 100 base VG (le réseau est découpé en tronçons reliés par des ponts qui filtrent les trames en fonction du destinataire diminuant ainsi les collisions. L’extrême est d’associer la fonction pont filtrant à chaque coupleur d’abonné, pour éliminer ainsi les collisions).
> Maille
C’est la forme classique d’organisation WAN (World Access Network). Les équipements sont reliés entre eux pour former une toile (Web) d’araignée (comme Internet). Chaque nœud a un rôle de routeur. Pour atteindre un nœud, les chemins sont multiples et choisis en fonction de critères comme la disponibilité d’un nœud ou d’un WAN, la qualité de transmission ou la charge ponctuelle sur un tronçon WAN donné.
> Anneau
Chaque nœud est relié à ses voisins pour former une boucle fermée et a un rôle actif dans la propagation des échanges. Cette structure est bien adaptée aux LAN, en particulier si l’on recherche la disponibilité.
Une rupture de liens entre deux nœuds peut être gérée pour garantir la communication. Chaque nœud a la possibilité de régénérer le signal et la structure se prête facilement à l’utilisation de la fibre optique, les distances de couverture pouvant être grandes.
Différents types d’interconnexion de réseaux
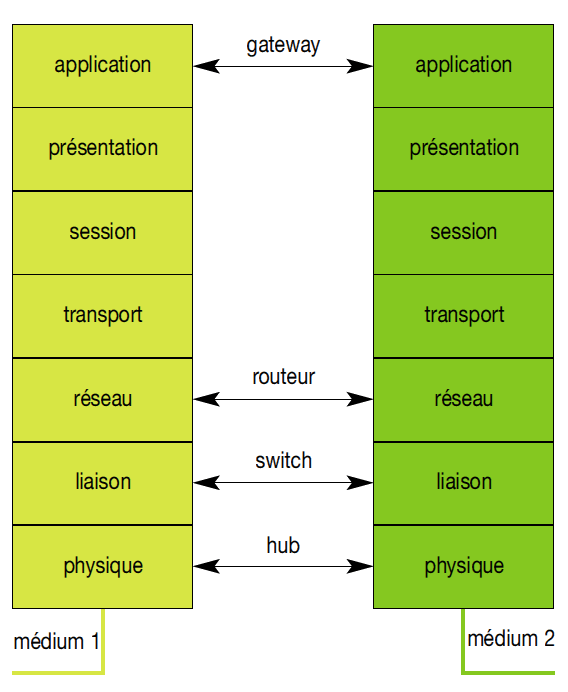
> Gateway
Unité fonctionnelle qui permet l’interconnexion de deux réseaux d’architecture différente.
> Routeur
Il crée une segmentation logique de réseaux. Il assure le passage de l’information entre deux sous-réseaux logiques distincts en choisissant le meilleur chemin. C’est la couche réseau qui assure ce routage. Il n’est pas transparent, il faut donc l’adresser pour le traverser.
> Switch (Bridge)
Il transmet les données reçues sur un port, seulement vers le port sur lequel la station destinatrice est connectée. Il assure la prolongation du support au delà des limites en distance du standard (segment) en réalisant une remise en forme des signaux. Il supprime les collisions et les paquets non valides et réduit la charge moyenne sur le réseau entier.
> Hub
Les données reçues sur un port sont envoyées à tous les autres ports.
Le hub ne possède pas de mémoire interne et diffuse les collisions ; plus il y a d’équipements, plus il y a de collisions et plus la charge est importante.
Pour de plus longues distances, il faut utiliser des switches (répéteur).
Bus et réseaux de terrain en automatisme
Bus capteurs et actionneurs
> Bus AS-i
AS-i (Actuator Sensor interface) est un bus de capteurs et d’actionneurs. C’est un bus déterministe aux temps de réponse très courts qui s’appuie sur un standard industriel ouvert soutenu par l’association AS-i. Cette association compte parmi ses membres les leaders du marché des capteurs, des actionneurs, des automates programmables et de la connectique.
AS-i offre donc l’avantage de ne pas être un réseau propriétaire. Son raccordement vers le niveau supérieur dans la hiérarchie des réseaux peut être réalisé au travers des passerelles (comme la passerelle Fipio/AS-i) ou en utilisant les capacités de communication d’un coupleur de bus (automate…).
La topologie d’AS-i est libre : point à point, en ligne ou en arbre en anneau.
> Bus CANopen
Le bus CANopen s’appuie sur la technologie CAN (Controller Area Network), développée à l’origine pour les systèmes embarqués des véhicules automobiles ; la technologie CAN est maintenant utilisée dans de nombreux domaines comme : le transport, les équipements mobiles, les équipements médicaux…
Le bus CANopen s’impose désormais dans les automatismes industriels et en particulier sur les machines. Il utilise une double paire torsadée blindée sur laquelle le raccordement d’un maximum de 127 équipements s’effectue par simple dérivation.
Le débit binaire variable entre 10 Kbits/s et 1 Mbits/s est conditionné par la longueur du bus.
> Bus Fip
Sur la base du standard WorldFip, deux profils ont été développés :
– Fipio, bus d’E/S de l’automate (niveau 1).
– Fipway, bus de synchronisation (niveau 2).
Le bus de terrain Fipio est un standard de communication entre différents constituants d’automatisme (niveau 1). Il permet la connexion de 127 équipements à partir du point de connexion intégré au processeur. Ce bus de terrain est basé sur les mécanismes producteurs/consommateurs.
Il est destiné au déport d’E/S jusqu’à 15 km et accueille des équipements tiers.
Réseaux locaux industriels (RLI)
> Réseau Fipway
Le réseau Fipway est un réseau local industriel assurant la communication entre les différents automates programmables.
Il sert de bus de synchronisation entre automates. il est dérivé de la norme FIP et inclut de nombreux services complémentaires.
> Bus Modbus et Jbus
Le bus Modbus (le bus Jbus est une variante de Modbus) répond aux architectures Maître/Esclave.
Il a été créé par la société Modicon pour interconnecter les automates programmables.
Le bus est composé d’une station Maître et de stations Esclaves. Seule la station Maître peut être à l’initiative de l’échange (la communication directe entre stations Esclaves n’est pas réalisable).
> Réseau Modbus Plus
Le réseau Modbus Plus est un réseau local industriel, déterministe et performant, répondant à des architectures étendues de type Client/Serveur, combinant haut débit (1 Mbit/s), supports de transmission simples et économiques ainsi que de nombreux services de messagerie.
On peut lui connecter 64 noeuds sur 1 800 m (32 noeuds sur 450 m sans répéteur) sur paire torsadée.
Réseaux Ethernet TCP/IP
Ethernet sans protocole de communication n’est pas un réseau mais un médium normé. Il concerne les couches Liaison (2) et Physique (1) du modèle OSI.
Bien qu’il existe une différence entre Ethernet et IEEE 802.3, par abus de langage, Ethernet est assimilé à la norme 802.3. Il est à noter qu’Ethernet TCP/IP est un réseau non déterministe.
Les principales caractéristiques de configuration d’Ethernet sont :
– Un tronçon (ou segment) principal Ethernet ne peut excéder 500 m.
– Un tronçon ne peut pas accepter plus de 100 nœuds, la distance minimale entre deux nœuds devant être supérieure à 2,5 m.
Le câble est généralement marqué tous les 2,5 m (par nœud, on entend toute entité unique adressable sur Ethernet).
– Le chemin entre 2 nœuds distants ne doit pas traverser plus de 2 répéteurs (ou 4 demi-répéteurs ou 1 répéteur et 2 demi-répéteurs). Présenter plus de 1 500 m de câble coaxial, présenter plus de 1 000 m de liaisons point à point (entre demi-répéteurs présents).
– Le câble de transceiver (ou dérivation) ne peut excéder 50 m (liaison transceiver vers coupleur station, vers répéteur, vers demi-répéteur).
– La distance théorique maximale entre deux stations est de 2,8 km.
Toutes ces limitations sont liées à la technique CSMA/CD (Carrier Sense Multiple Access with Collision Detection) et à la vitesse de propagation des signaux électriques sur les médias ou dans les constituants, ainsi qu’aux phénomènes de réflexion.
Il existe une multitude de protocoles associables à Ethernet. Deux sont devenus des standards, à savoir : TCP et IP.
IP (Internet Protocol) :
IP est le protocole principal de la couche réseau qui est utilisé à la fois par TCP, UDP, ICMP et IGMP.
Une application peut également accéder directement à IP (rare mais possible).
Chaque bloc de données qui circule sur l’Internet traverse la couche IP de tous les hôtes en extrémités du réseau ou routeurs intermédiaires. Il assure le routage des messages qui est direct si le destinataire est sur le même réseau ou indirect via routeur ou passerelle. Le service est non fiable, il n’existe aucune garantie que le datagramme arrive à destination. Il fournit un service qualifié de “au moindre effort” ou “au mieux”. En cas de saturation de buffers, IP ne sait que rejeter un datagramme et essayer de prévenir l’émetteur via un message ICMP.
La fiabilité doit être assurée par les couches supérieures.
TCP (Transmission Control Protocol) :
TCP est destiné à être implémenté sur la couche transport du modèle OSI. C’est un protocole de transport fiable orienté connexion et flux de données. TCP se charge de traiter la non fiabilité d’IP.
De nombreux services sont disponibles sur les coupleurs Ethernet en utilisant des Applets (Petit programme téléchargé qui s’exécute sur l’équipement client qui en fait la demande) à savoir :
– Applets de diagnostic embarqués afin de pouvoir assurer un diagnostic de l’automate et de sa configuration de manière simple et transparente au travers d’un navigateur Internet.
– Applet d’éditeur de données dont l’objectif est de pouvoir accéder à la base de données (protégée par mot de passe) de l’automate par un navigateur Internet.
– Applet d’éditeur graphique permettant de visualiser et commander, depuis un navigateur Internet, sous forme graphique (bargraphes, curseur, afficheur, courbes…) les données du procédé.
– Applet autorisant le report d’alarmes d’en gérer les acquis…
De plus, certains coupleurs disposent d’une mémoire utilisateur permettant le chargement de pages HTML et ainsi autoriser la conception d’un dialogue homme/machine temps réel embarqué.
Classification des bus de terrain
Technologies
La plupart des bus proposent différentes solutions techniques, différents ASICs (Application Specific Integrated Circuit : Circuit intégré, composant électronique dédié à une application spécifique) en particulier pour se connecter au bus à un coût adapté au produit connecté et à ses performances.
Il peut ainsi exister un composant particulièrement adapté pour le niveau 1 et un autre particulièrement adapté pour le niveau 2.
L’existence de plusieurs composants bien ciblés permet au fabricant de proposer des produits au rapport coût / performance optimisé.
Il arrive que derrière une même appellation, se cachent deux bus différents.
Profils de communication
Une norme de réseau définit les règles visant à permettre aux équipements s’y conformant de communiquer entre eux. Mais la plupart des normes proposent, ou autorisent par manque de précision, des alternatives de fonctionnement parfaitement incompatibles entre elles, chacune adaptée à un contexte d’utilisation. La simple conformité à la norme garantit donc rarement ce que recherche l’utilisateur, à savoir la communication des équipements entre eux.
Garanties d’un constructeur
Une des meilleures assurances de bon fonctionnement d’équipements hétérogènes dans le cadre d’une installation distribuée demeure la garantie d’un grand constructeur. Cela suppose bien évidemment la volonté d’un tel constructeur d’ouvrir ses architectures.
C’est aujourd’hui le cas de principaux offreurs d’automatismes programmables comme Rockwell, Schneider Electric ou Siemens qui maîtrisent une technologie de bus de terrain, intégrée de façon privilégiée dans leurs offres :
> CPU (Central processing unit) automates intégrant la connexion au bus.
> Large gamme de modules d’E/S TOR (tout ou rien), analogiques.
> Nombreux équipements connectés du constructeur et de partenaires, parfois concurrents :
– Distributeurs pneumatiques.
– Codeurs de position.
– Variateurs de vitesse et produits de contrôle d’axes.
– Identification : lecteurs code-barre, lecteurs inductifs etc.
– Produits de dialogue Homme-machine (HMI : Human Machine Interface).
– Produits spécifiques à un métier.
– Systèmes de supervision.
Sites relatifs aux principaux bus d’automatisme
https://www.as-interface.com
https://www.can-cia.de
https://www.controlnet.org
https://www.industrialethernet.com
https://www.industrial-ethernet.com
https://www.fieldbus.org
https://www.modbus.org
https://us.profinet.com
https://www.knx.org
https://www.dali-ag.org/
https://www.ethercat.org
https://www.ethernet-powerlink.org/
