



Lexium STS
Lexium STS : Robots SCARA pour pick & place à grande vitesse
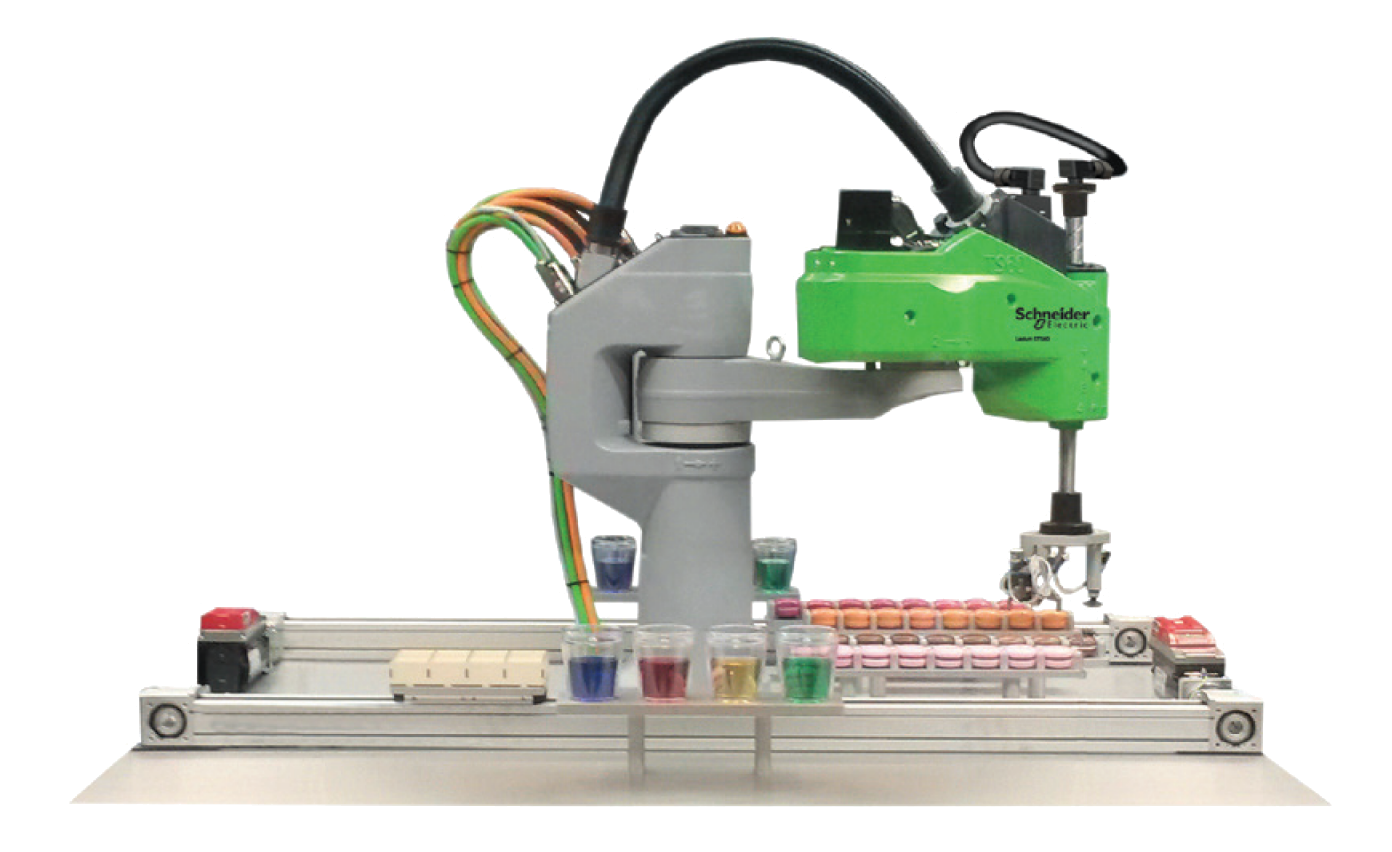
Les robots Lexium STS de Schneider Electric sont des robots manipulateurs industriels destinés à la manipulation de pièces pour les machines-outils de stockage-déstockage, de palettisation-dépalettisation et de chargement-déchargement, à la manipulation de pièces d’essai, à l’assemblage de pièces et à de nombreuses autres applications.
Cette solution robotique s’ajoute aux solutions d’automatismes PacDrive 3 et a été spécifiquement conçue pour répondre aux attentes de la conception de machines d’emballage et de manutention, en particulier dans les domaines agroalimentaire, pharmaceutique et des biens de consommation.

Offre Lexium STS
L’offre de robots Lexium STS est utilisée pour les applications de pick & place à grande vitesse :
> avec des robots 4 axes SCARA,
> jusqu’à 100 cycles par minute,
> avec une portée maximale de 800 mm,
> avec une charge maximale de 8 kg,
> avec une répétabilité de position (ISO 9283) de ± 0,01 mm.
Structure du robot Lexium STS
> Les deux types de robots disponibles se différencient par le type de montage (montage au sol ou montage mural), ce qui augmente la flexibilité et l’intégration des robots Lexium STS sur les lignes automatisées.
> Trois tailles d’arbre sont disponibles, ce qui offre jusqu’à trois plages d’espace de travail :
– STS40 : 400 mm,
– STS60 : 600 mm,
– STS80 : 800 mm.

> Chaque taille d’arbre est proposée avec deux courses de vis à bille (Ø 25 mm) :
– 200 mm,
– 400 mm.

Équipement
> Les robots Lexium STS sont équipés de quatre moteurs (un par axe) et de mécanismes de transmission de mouvement.
> Selon les modèles ils sont fournis avec les équipements suivants :
– un câble d’entrées/sorties utilisateur à six fils à utiliser en fonction des besoins du client (entrées, sorties, …),
– une carte ARMIO pour 8 entrées/sorties logiques et 4 entrées/sorties analogiques maximum (cela inclut le câble d’entrées/sorties utilisateur) :
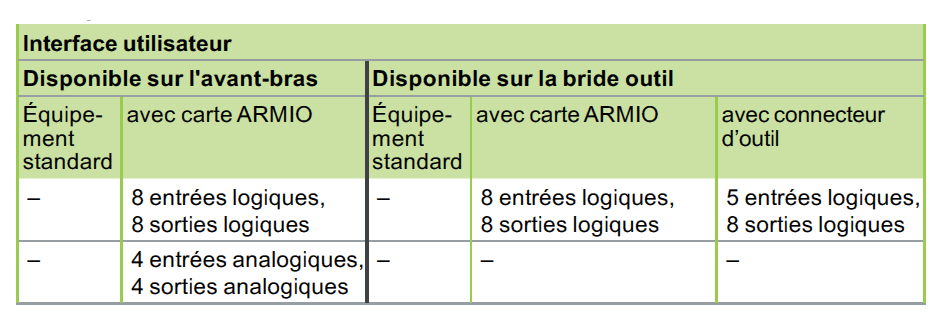
– un soufflet plastique pour protéger la vis à bille contre la poussière et les éclaboussures liquides est disponible en deux tailles pour s’adapter aux deux modèles de vis à bille.
Câbles système : les câbles nécessaires sont fournis par Schneider Electric : câbles d’alimentation, câbles codeur, câbles Sercos, câble d’entrées/sorties logiques et câble de bus CANopen, disponibles sous différentes longueurs jusqu’à 30 m.
Les robots Lexium STS sont livrés sans pince. Les pinces peuvent être commandées auprès de fabricants spécialisés.
Caractéristiques
> Classe de protection : IP 54.
> Classe de propreté : 6 selon la norme ISO 14644-1 (s’il est équipé d’un soufflet).
> Certification : CE, UL, KCs.
Option pour robots Lexium STS
> Les robots Lexium STS sont livrés avec un capot vert sur l’avant-bras (axe 2) ;
l’avant-bras du robot Lexium STS peut être livré dans une couleur spécifique, sur demande.
> Un connecteur d’outil spécifique est disponible pour faire passer la fixation de la pince d’une forme circulaire à une forme carrée.
Offres complémentaires
> Les robots Lexium STS sont intégrés dans le système PacDrive 3 :
– Les servo variateurs de la série Lexium 62 (1) contrôlent la gamme de robots Lexium STS.
– Les modules d’alimentation Lexium 62 fournissent l’alimentation CC.
Raccordement de l’alimentation : le module d’alimentation Lexium 62 doit être raccordé en monophasé ou en triphasé pour fournir une tension de bus DC de 320 VDC minimum et 400 VDC maximum.
Les tensions inférieures à cette valeur minimale risquent de compromettre la performance du système de manière significative. Les tensions de bus DC supérieures à cette valeur maximale ne sont pas supportées par les robots Lexium STS.
> En plus des robots Lexium STS, Schneider Electric propose également des robots cartésiens (1) et des robots Delta (1).
Ces offres de robots se composent d’éléments standardisés, de solutions complètes et de solutions personnalisées pour différentes tâches de mouvement à 1, 2 ou 3 dimensions (robots cartésiens) et jusqu’à 4 (robots Delta).
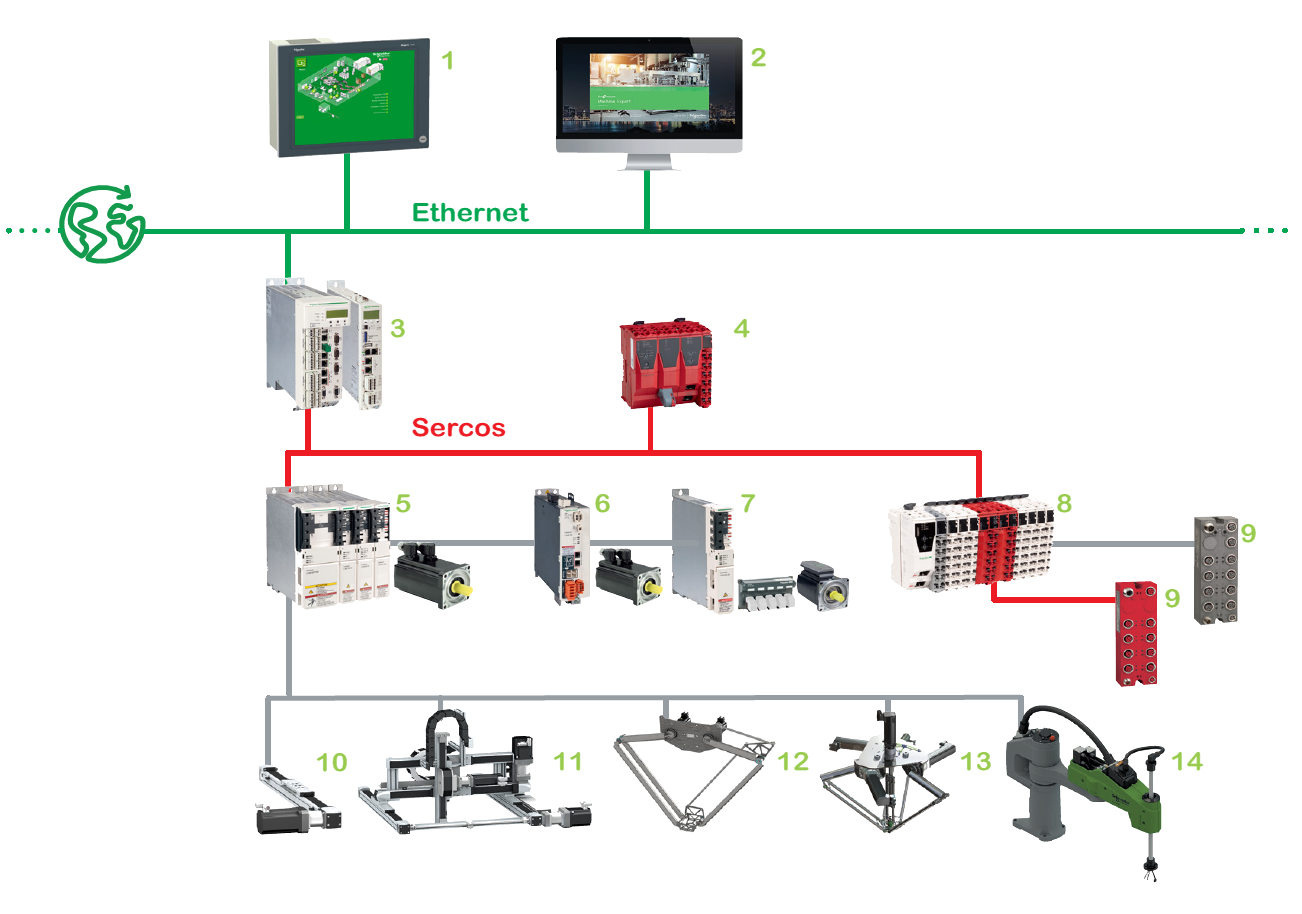
(1) Small Panel Magelis HMI.
(2) SoMachine Motion : logiciel de configuration.
(3) PacDrive LMC Eco/Pro/Pro2 : contrôleur de mouvement pour automatiser les machines/lignes avec 0 à 130 axes servo ou robot.
(4 ) Modicon TM5CSLC : contrôleur logique de sécurité.
(5) Lexium 62 et moteurs : servo variateurs multiaxes et servo moteurs (2).
(6) Lexium 52 et moteurs : servo variateurs autonomes et servo moteurs.
(7) Lexium 62 ILM : servo variateurs intégrés multiaxes.
(8) Modicon TM5 : module d’interface Sercos, module d’extension d’entrées/sorties de sécurité et module d’extension d’entrées/sorties (IP 20).
(9) Modicon TM7 : module d’extension et module d’extension de sécurité (IP 67).
(10) Lexium PAS : Axes portiques avec structure d’axe fixe.
(11) Lexium MAX : Systèmes multi-axes pour des solutions de positionnement à 1, 2 ou 3 directions.
(12) Robots Delta 2 pour solutions de pick & place.
(13) Robots Delta 3 pour solutions de pick & place.
(14) Lexium STS : robots SCARA pour pick & place à grande vitesse.
Description Robot Lexium STS
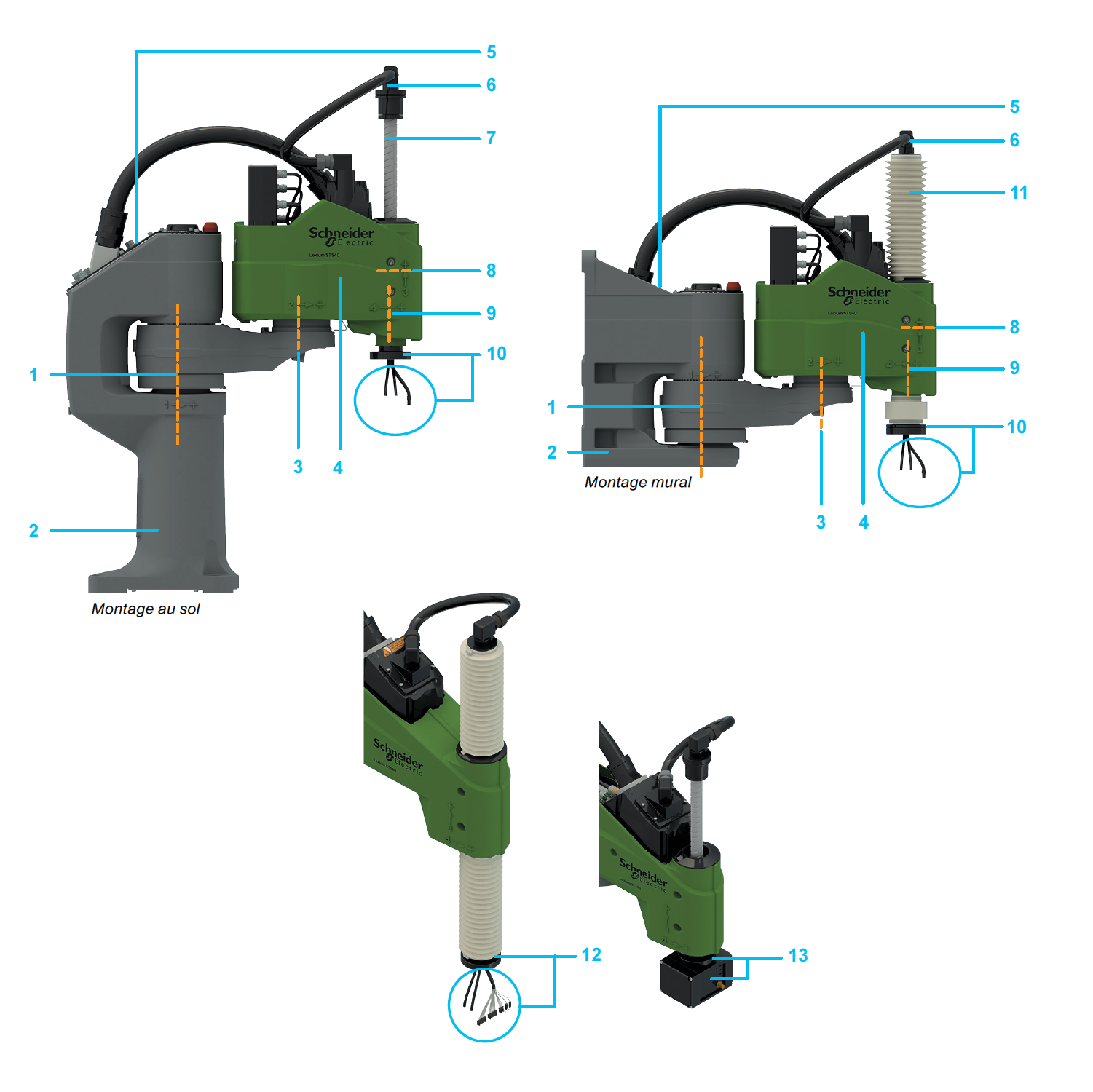
(1) Axe 1 (y compris moteur) ; premier bras.
(2) Pied de montage (montage au sol) / bras de montage (montage mural).
(3) Axe 2 (y compris moteur).
(4) Avant-bras (deuxième bras) avec capot vert en standard.
(5) Platine de connexion pour câbles codeur, pneumatiques, alimentation et entrées/sorties.
(6) Câble d’entrées/sorties utilisateur (équipement standard).
(7) Vis à bille (Ø 25 mm, course 200 ou 400 mm).
(8) Axe 3 (y compris moteur).
(9) Axe 4 (y compris moteur).
(10) Bride d’outil (porte-pince) équipée de câbles d’entrées/sorties utilisateur.
(11) Vis à bille équipée d’un soufflet.
(12) Bride d’outil (porte-pince) équipée d’une carte ARMIO et de câbles d’entrées/sorties utilisateur.
(13) Bride d’outil avec connecteur d’outil optionnel.
Platine de connexion
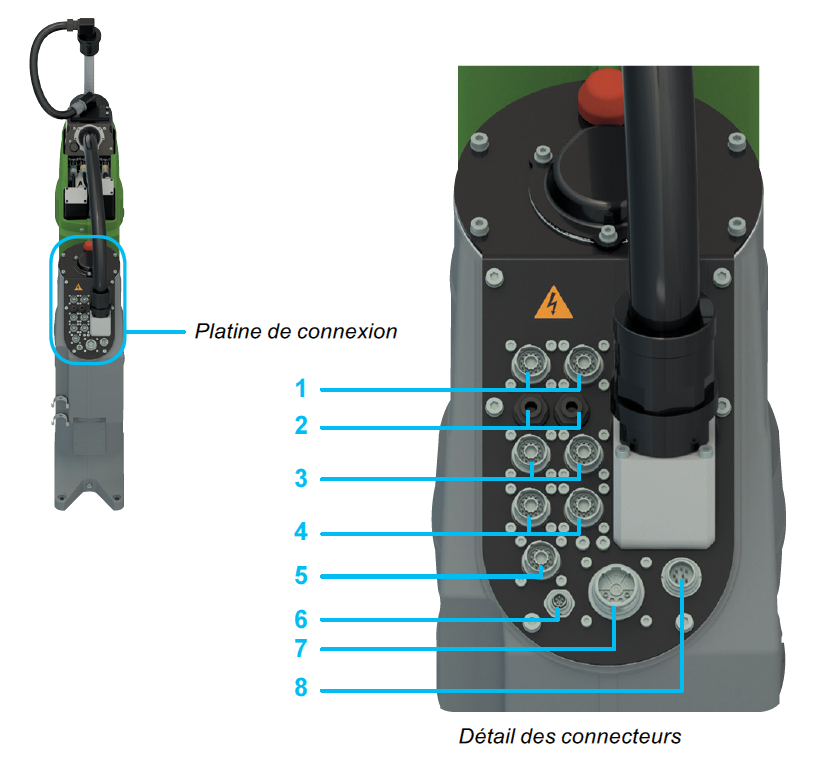
(1) Deux connecteurs pour axe moteur 4 : connexion codeur (marquée X1214) et connexion alimentation (marquée X1224).
(2) Deux connecteurs pour connexions pneumatiques (marquées P1 et P2).
(3) Deux connecteurs pour axe moteur 3 : connexion codeur (marquée X1213) et connexion alimentation (marquée X1223).
(4) Deux connecteurs pour axe moteur 2 : connexion codeur (marquée X1212) et connexion alimentation (marquée X1222).
(5) Un connecteur pour axe moteur 1 : connexion codeur (marquée X1211).
(6) Un connecteur pour connexion alimentation 24 V (marquée X1210).
(7) Un connecteur pour axe moteur 1 : connexion alimentation (marquée X1221).
(8) Un connecteur pour connexion de bus CANopen ou connexion d’entrées/sorties.
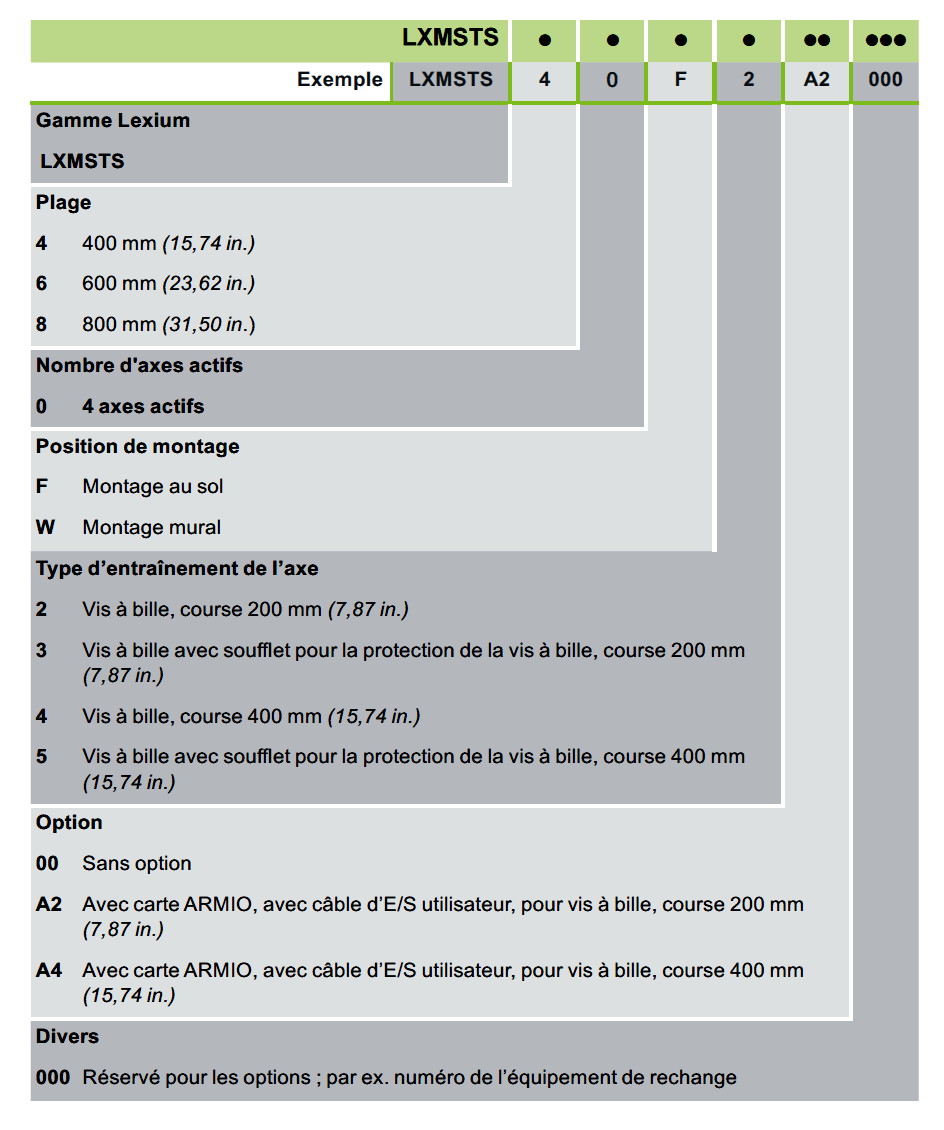
Code type
Vidéo de présentation
