



TeSys T
TeSys T : Système de gestion de moteur
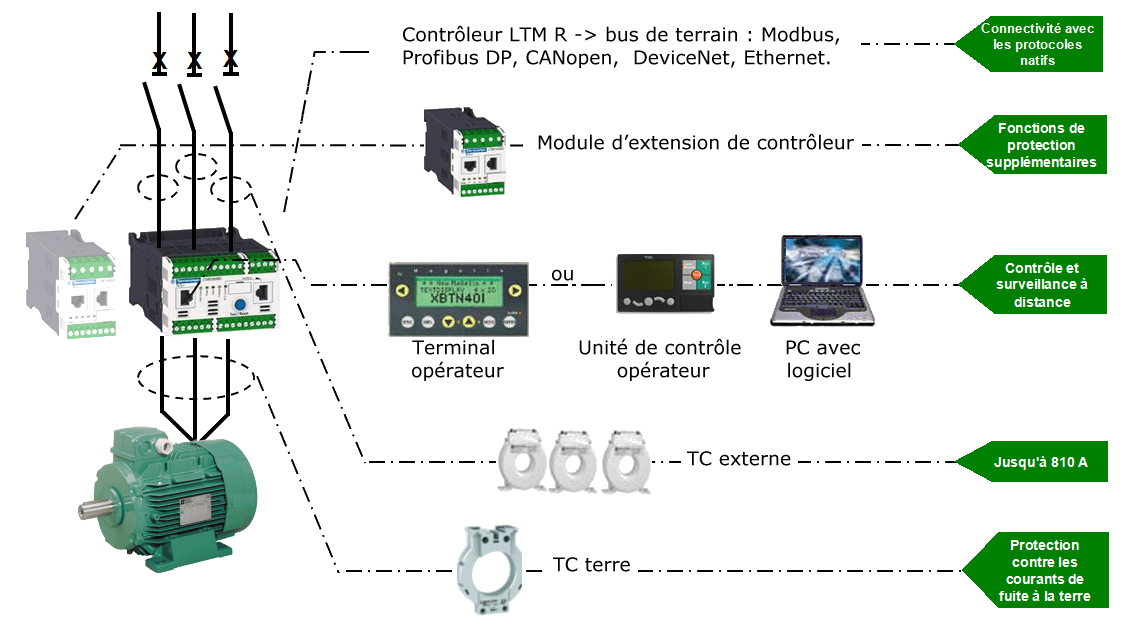
Le système de gestion de moteur TeSys T de Schneider Electric offre des fonctions de protection, de commande et de surveillance pour les moteurs à induction AC monophasés et triphasés.
Ce système modulaire est conçu pour satisfaire les exigences des systèmes de protection intégrés en termes de communications ouvertes et d’architecture globale.
Des capteurs de précision avec la protection intégrale du moteur à semi-conducteur, des fonctions de surveillance, des fonctions de diagnostic et de statistiques, ainsi que des défauts et des alarmes permettent une meilleure utilisation des moteurs.
Les composants matériels du système sont le contrôleur LTM R, le module d’extension LTM E et l’unité
de contrôle opérateur LTM CU.
Le système peut être configuré et contrôlé :
– A l’aide d’un équipement IHM : Magelis XBT ou TeSys LTM CU.
– A l’aide d’un PC exécutant un conteneur FDT ou SoMove avec TeSys T DTM.
– A l’aide d’un automate connecté au système via le réseau de communication.
– A l’aide du serveur Web Ethernet du contrôleur LTM R Ethernet.
Les composants, tels que les transformateurs de courant de charge moteur externes et les transformateurs
de courant de fuite à la terre, permettent de rajouter des fonctionnalités.
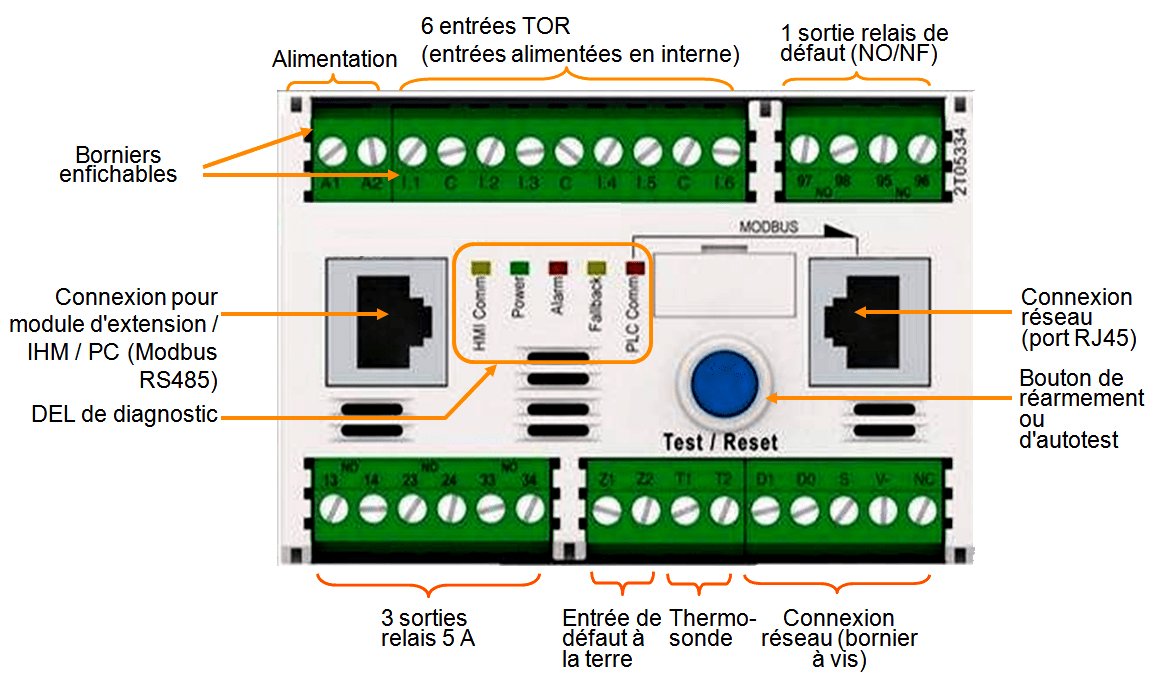
Contrôleur LTM R
– Détection de l’intensité : de 0,4 à 100 A.
– Entrées de courant.
– 6 entrées TOR logiques.
– 4 sorties relais : 3 unipolaires unidirectionnelles, 1 bipolaire unidirectionnelle.
– Connexions pour capteur de courant de fuite à la terre.
– Connexion pour capteur de température du moteur.
– Connexion réseau.
– Connexion pour IHM ou module d’extension.
– Fonctions de protection, de mesure et de surveillance de l’intensité.
– Fonctions de contrôle du moteur.
– Voyant d’alimentation, voyants de défaut et d’alarme, voyants de communication réseau et d’alarme, voyant de communication avec l’IHM.
– Fonction de test et de réinitialisation.
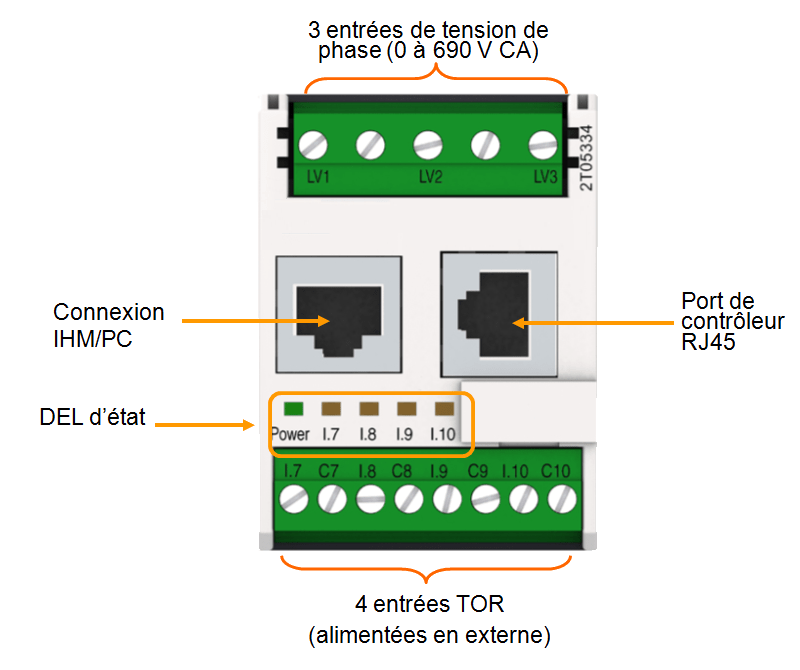
Module d’extension LTM E
– Détection de la tension : de 110 à 690 V AC.
– 3 entrées de tension.
– 4 entrées TOR logiques.
– Fonctions de protection, de mesure et de surveillance de la tension supplémentaire.
– Voyant d’alimentation, voyants d’état des entrées logiques.
SoMove avec TeSys T DTM (Device Type Manager)
Le logiciel SoMove est une application basée sur Microsoft Windows qui repose sur la technologie ouverte FDT (Field Device Tool) /DTM.
SoMove contient de nombreux DTMs. Un DTM spécifique existe pour le système de gestion de moteur TeSys T.
– Configuration du système via les entrées de menu.
– Affichage de paramètres, d’alarmes et de défauts.
– Commande du moteur.
– Personnalisation des modes de fonctionnement.
Principes de contrôle
Des fonctions sont prédéfinies et correspondent aux usages les plus fréquents. Elles sont prêtes à l’emploi et il suffit de définir un simple paramètre après la mise en service du contrôleur LTM R pour les mettre en œuvre.
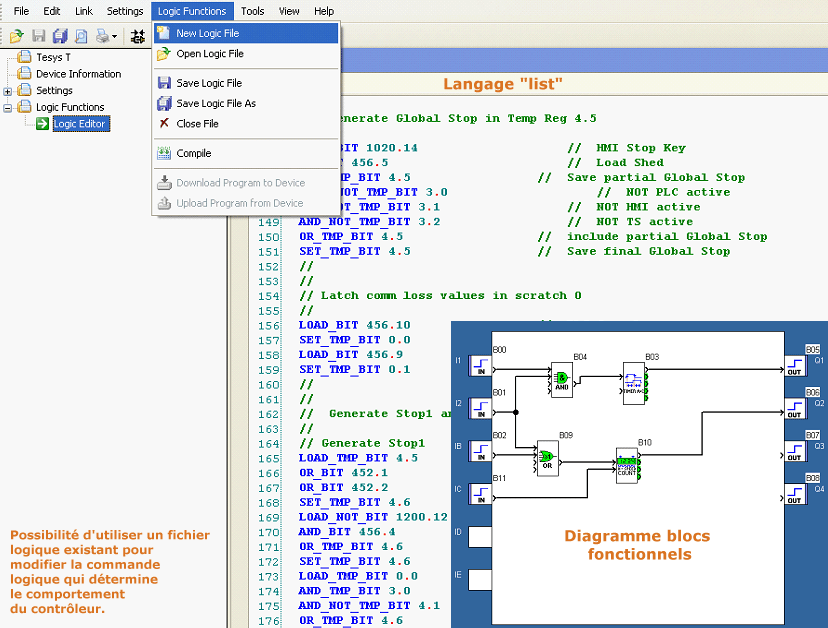
Les fonctions de contrôle et de surveillance prédéfinies peuvent être adaptées à l’aide de l’éditeur de programme applicatif de TeSys T DTM afin de :
– Personnaliser l’utilisation des résultats des fonctions de protection.
– Modifier le fonctionnement des fonctions de contrôle et de surveillance.
– Modifier la logique d’E/S de contrôleur LTM R prédéfinie.
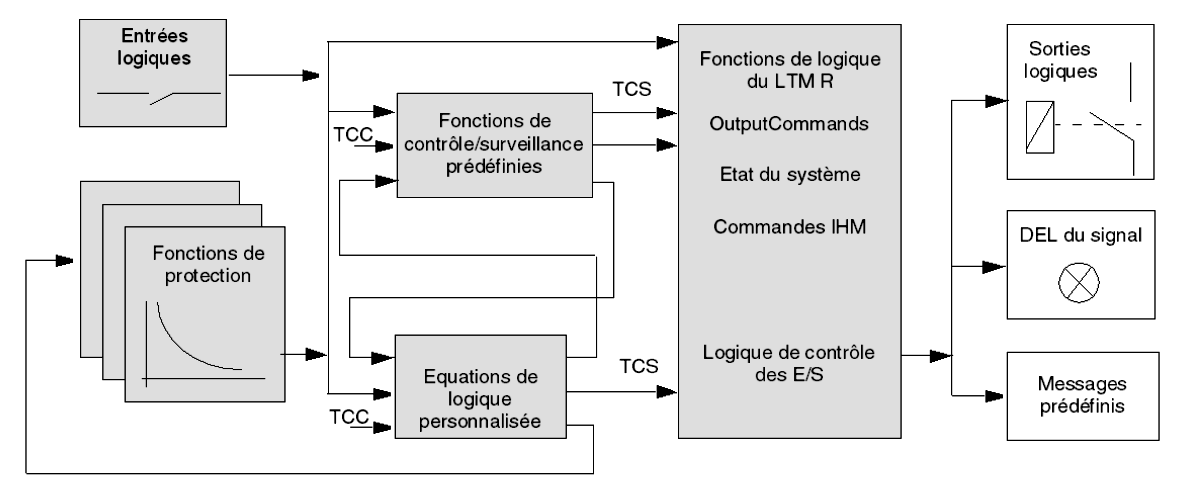
L’exécution des fonctions de contrôle et de surveillance se décompose en trois phases.
– L’acquisition des données d’entrée :
> Le résultat de l’exécution de la fonction de protection
> Les données de logique externe issues des entrées logiques.
> Les commandes de télécommunication (TC) reçues de la source de contrôle.
– Le traitement logique par la fonction de contrôle ou de surveillance.
– L’utilisation des résultats du traitement :
> L’activation des sorties logiques.
> L’affichage des messages prédéfinis.
> L’activation des voyants.
> Les signaux de télécommunication (TS) envoyés via une liaison de communication.
Types de modes de fonctionnement
Il existe plusieurs types de modes de fonctionnement :
Surcharge
Toutes les applications de démarreur de moteur dans lesquelles l’utilisateur affecte :
– Les entrées logiques I.1, I.2, I.3 et I.4.
– Les sorties logiques O.1 et O.2.
– Les commandes Aux1, Aux2 et Stop depuis le clavier IHM.
Les E/S peuvent être définies à l’aide d’un programme de contrôle géré à distance par le contrôleur de réseau maître, par une IHM ou par une logique personnalisée.
Indépendant
Applications de démarrage direct comprenant un moteur à 1 sens de marche, fonctionnant à la tension nominale.
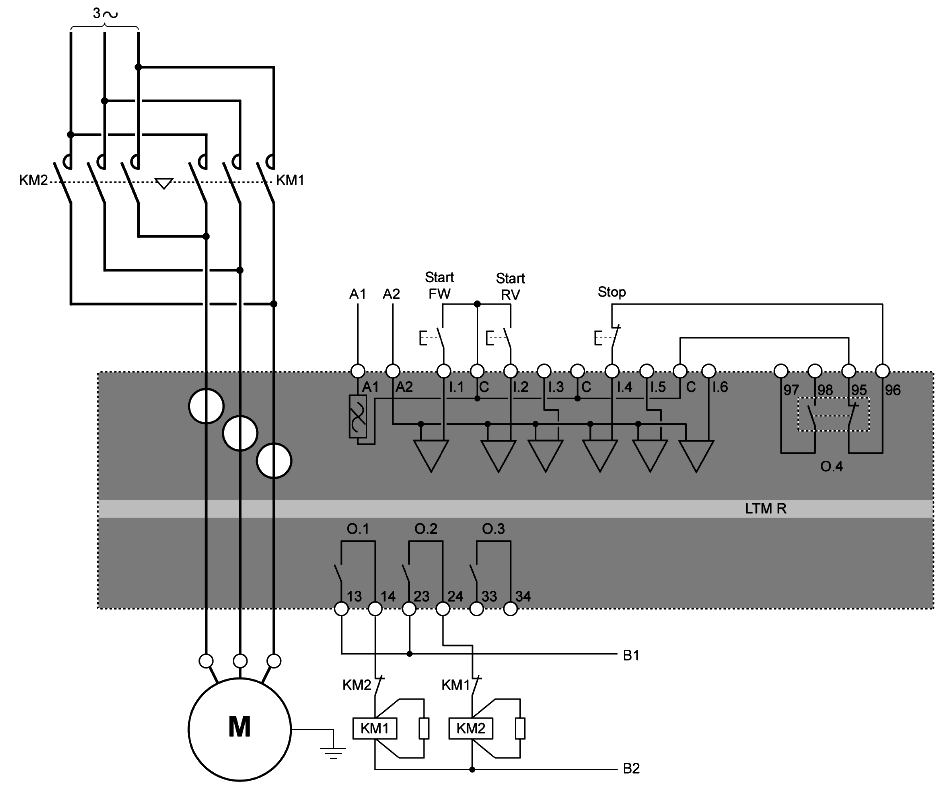
Inverse
Applications de démarrage direct comprenant un moteur à 2 sens de marche, fonctionnant à la tension nominale.
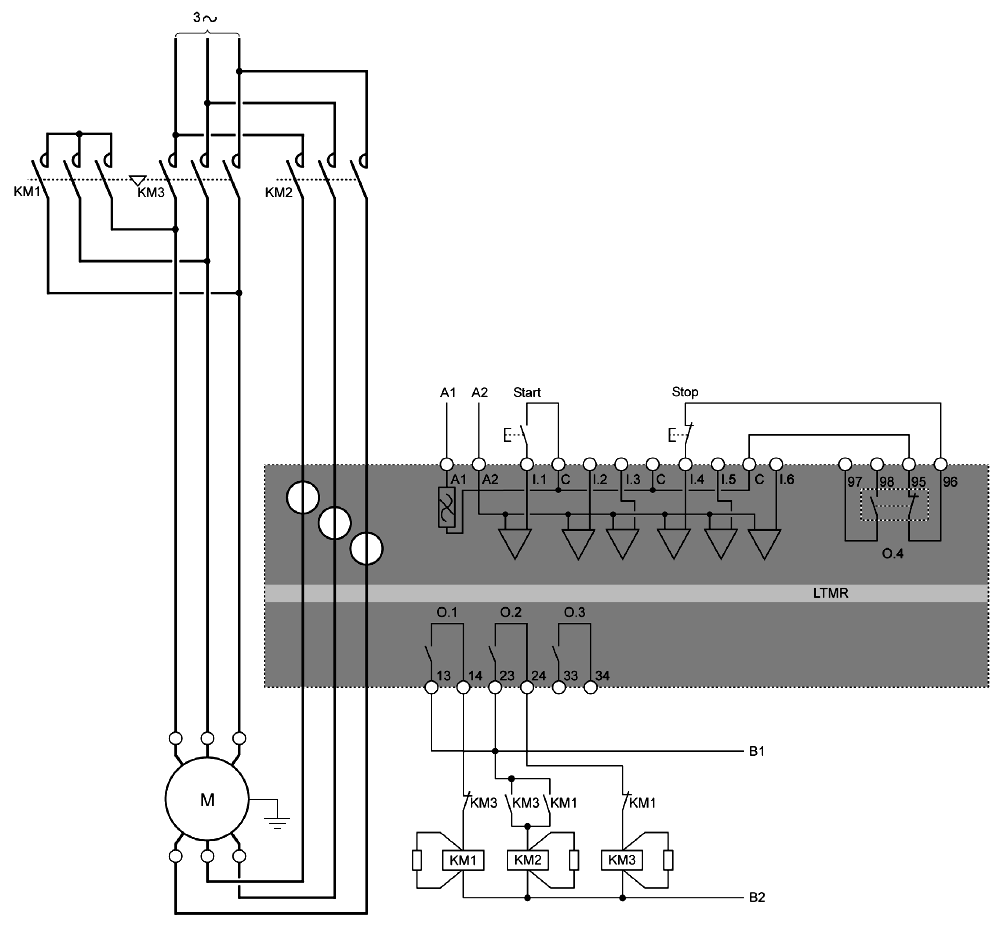
2 étapes
Applications de démarrage de moteur à tension réduite :
– Les configurations étoile-triangle.
– Les résistances primaires de transition ouverte.
– Les autotransformateurs de transition ouverte.
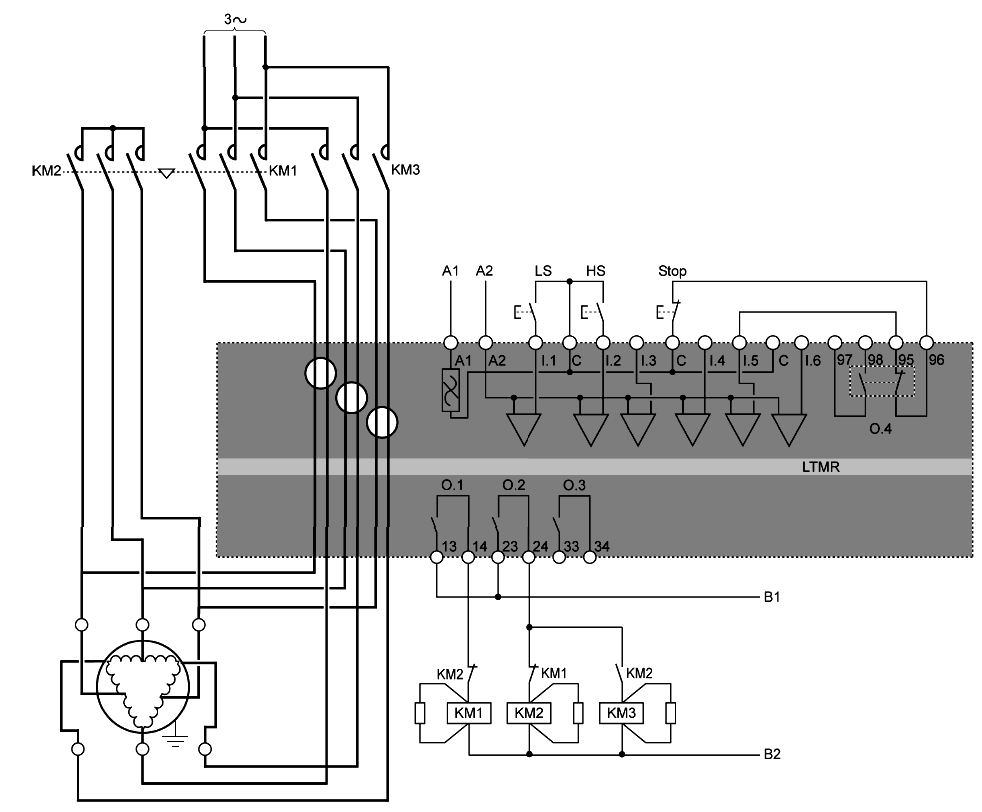
2 vitesses
Les applications à 2 vitesses pour les types de moteurs suivants :
– Dahlander (pôle conséquent).
– A commutateur de polarité.
Comportement des entrées logiques
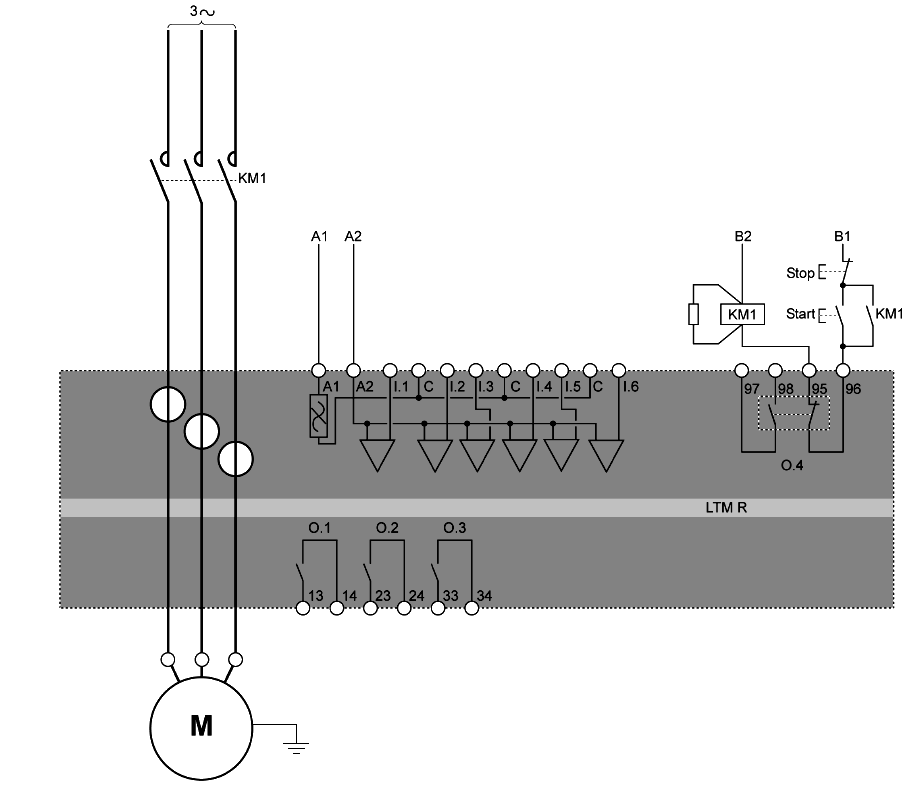
Lorsque l’on sélectionne un mode de fonctionnement, on spécifie que les entrées logiques sont câblées soit pour le contrôle à 2 fils (maintenus), soit pour le contrôle à 3 fils (par impulsion).
2 fils (maintenus)
Après la détection du front montant au niveau de l’entrée affectée au démarrage du moteur, le contrôleur LTM R déclenche une commande d’exécution. Cette commande reste active uniquement pendant la durée d’activation de l’entrée. Le signal n’est pas verrouillé.
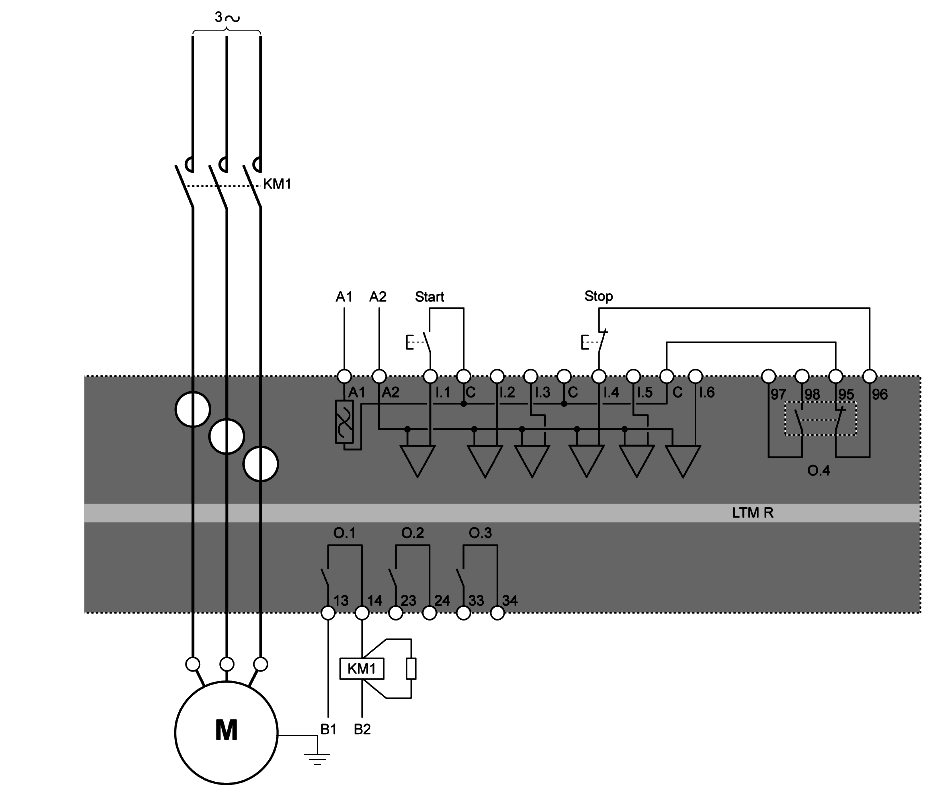
3 fils (par impulsion)
Le contrôleur LTM R :
– Verrouille la commande d’exécution après la détection du front montant au niveau de l’entrée affectée au démarrage du moteur.
– Après une commande d’arrêt, désactive la commande d’exécution afin d’inhiber le relais de sortie monté en série avec la bobine du contacteur démarrant ou arrêtant le moteur.
– Après un arrêt, doit détecter le front montant au niveau de l’entrée afin de verrouiller la commande d’exécution.
Comportement des sorties logiques
2 fils (maintenus)
Une commande d’arrêt annule la condition de repli et désactive les sorties logiques O.1 et O.2 pendant le temps où elle est active. Lorsqu’elle n’est plus active, les sorties logiques O.1 et O.2 repassent à l’état de repli programmé.
3 fils (par impulsion)
Une commande d’arrêt annule une condition de repli et désactive les sorties logiques O.1 et O.2. Les sorties restent inactives après la désactivation de la commande d’arrêt et ne repassent pas à l’état de repli programmé.
O.3 Activée par toute alarme de protection déclenchée (NO).
O.4 Activée par tout défaut de protection déclenché (N0/NC).
Lorsque la tension de contrôle est trop faible ou inexistante NC ouvert, NO fermé.
Gestion des défauts
Lorsque le contrôleur LTM R détecte une condition de défaut et déclenche, le défaut est mémorisé. Il le reste même si la condition de défaut sous-jacente est supprimée, et ce jusqu’à ce qu’il soit effacé par une commande de réarmement.
Le réglage du paramètre défaut “mode de réarmement” détermine la façon dont le contrôleur LTM R gère les défauts :
– Manuel (réglages usine).
– Automatique.
– A distance.
Il est impossible de changer le mode de réarmement des défauts tant qu’un défaut est actif. Tous les défauts doivent être réarmés pour pouvoir changer de mode.
Les principaux défauts surveillés (LTM R + LTM E
– Diagnostic :
> Test de la commande de démarrage.
> Test de la commande d’arrêt.
> Vérification du fonctionnement du moteur.
> Vérification de l’arrêt du moteur.
– Erreurs de câblage/configuration :
> Connexion PTC.
> Inversion CT.
> Inversion tension phase.
> Inversion courant phase.
> Perte tension phase.
> Configuration phase.
– Défauts internes :
> Débordement de pile.
> Chien de garde.
> Checksum ROM.
> EEROM.
> Processeur.
> Température interne.
– Capteur température moteur :
> PTC binaire.
> PT100.
> PTC analogique.
> NTC analogique.
– Surcharge thermique :
> Défini.
> Inversion thermique.
– Courant :
> Démarrage Long.
> Blocage.
> Déséquilibre courant phase.
> Perte courant phase.
> Surintensité.
> Sous-intensité.
> Courant de terre interne.
> Courant de terre externe.
– Tension :
> Surtension.
> Sous-tension.
> Déséquilibre tension phase.
– Puissance
> Sous-charge en puissance.
> Surcharge en puissance.
> Sous-facteur de puissance.
> Sur-facteur de puissance.
– Perte de communication :
> Automate vers LTM R.
> IHM vers LTM R.
Interface de surveillance
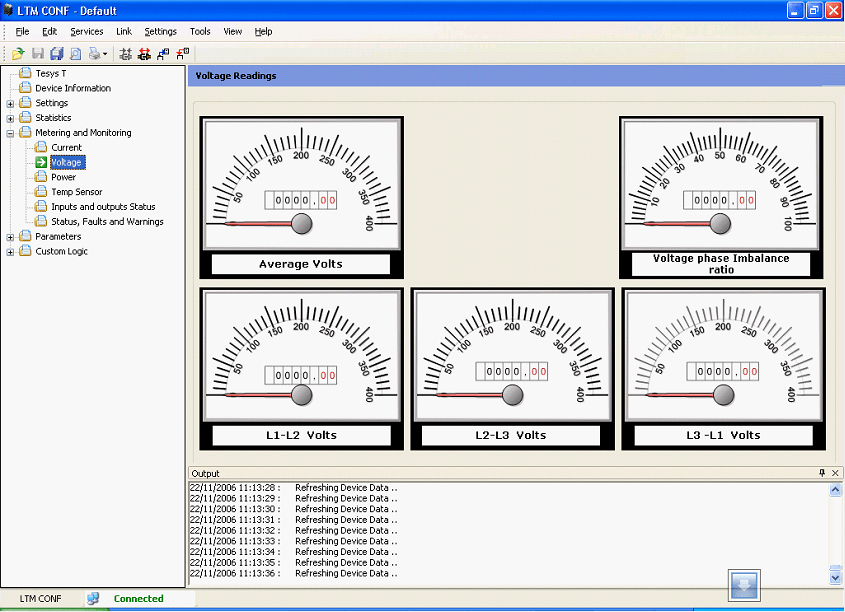
Surveillance : statistiques
– Historique de comptage pour tous les types de défauts.
– Défauts de protection : surcharge, surintensité…
– Défauts de diagnostic : perte de communication au niveau du port IHM, défaut interne…
– Enregistrement de l’historique de contrôle du moteur.
– Compteur de démarrages et durée de fonctionnement du moteur.
– Démarrages du moteur par heure.
– Compteur de verrouillage du cycle rapide.
– Compteur de délestages.
– Enregistrement du dernier démarrage.
– Enregistrement des 5 derniers défauts (Code de défaut, date et heure, valeur des paramètres et des mesures.
Surveillance : défauts de diagnostic
– Défauts internes : Chien de garde (débordement négatif/positif), température.
– Tests de commandes de contrôle : Commande marche/arrêt (test de courant après la commande), vérification du fonctionnement et de l’arrêt du moteur (test de courant durant l’étape).
– Défauts de connexion : Connexion du transformateur de courant, connexion de tension, connexion du capteur de température.
– Perte de communication : Connexion au bornier local, perte de communication (IHM, réseau, module d’extension).
Surveillance : états du moteur
– États de fonctionnement : Prêt, démarrage, exécution, non prêt.
– État de surcharge thermique : Délai avant déclenchement (avant le déclenchement du défaut), délai de réarmement (après une surcharge thermique).
Conclusion
TeSys T offre de nombreuses possibilités :
– Ouvert à tous les principaux protocoles de communication (niveau élevé d’adaptabilité).
– Les principales fonctions de contrôle et de protection sont disponibles sur le contrôleur, sans module optionnel additionnel.
– Fonctions de contrôle et de d’alimentation réunies en un seul équipement.
