



XY2 SB
Preventa XY2 SB : pupitres de commande bimanuelle
Les pupitres de commande bimanuelle de Schneider Electric sont destinés a la commande de machines dangereuses. Ils assurent une protection individuelle de l’opérateur en complément de dispositifs de protection collective.
L’ergonomie du pupitre XY2SB permet de réduire l’apparition de maladies professionnelles liées aux gestes répétitifs des mains. Ils sont conformes aux normes EN 574 et ISO 13851.
Degré de protection IP65.
Pupitre équipé de 2 boutons-poussoirs a impulsion pour la commande et d’un coup de poing d’arrêt d’urgence, avec ou sans pré-câblage.
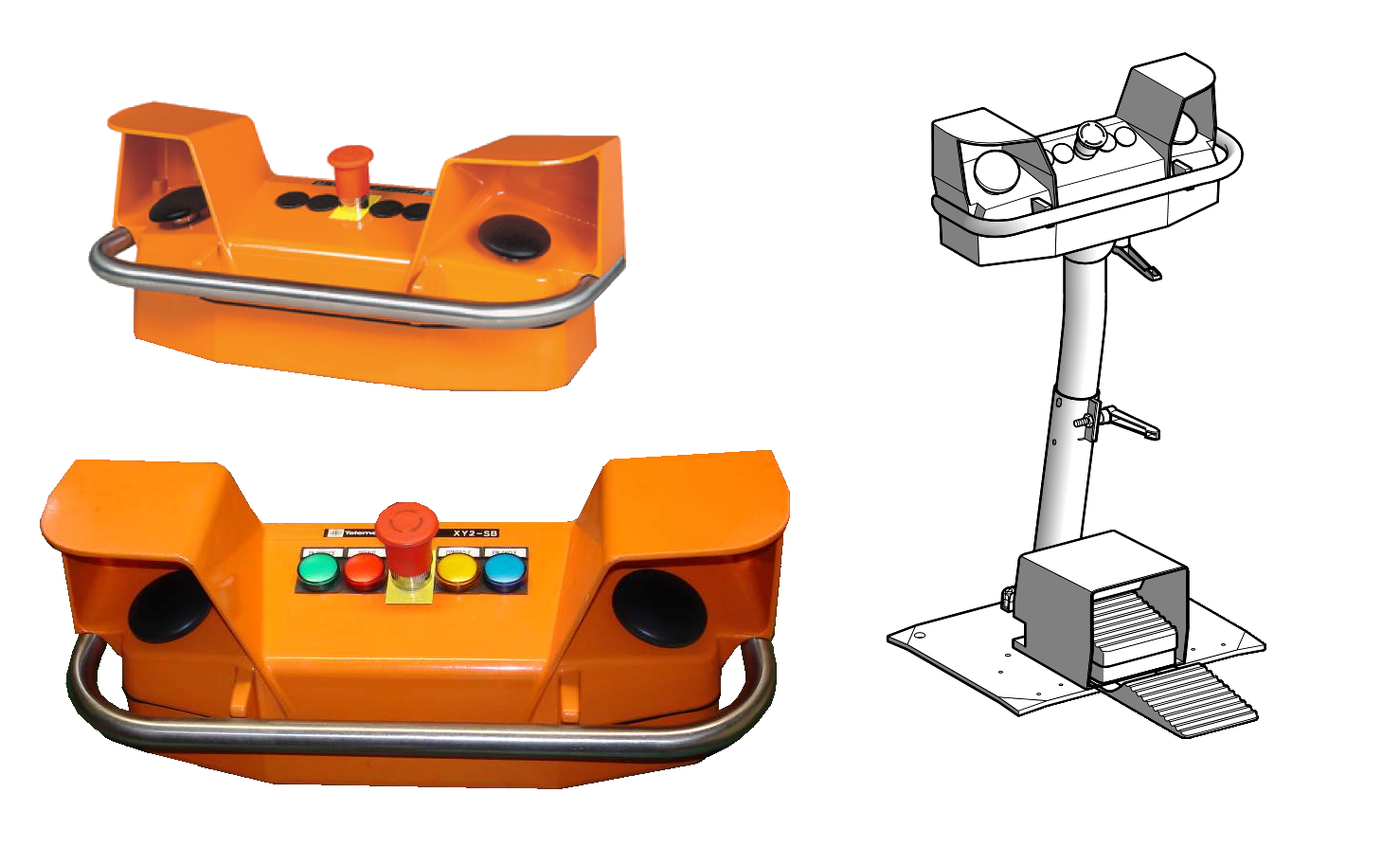
Le pupitre de commande bimanuelle XY2-SB•• est associé au module de sécurité Preventa XPS-BC.
Dispositions réglementaires – Normes européennes – Décrets
a) EN 292-1 : Sécurité des machines – Notions fondamentales, principes généraux de conception
Partie 1 : terminologie de base, méthodologie
Extraits : Commande bimanuelle
Commande nécessitant une action maintenue qui, pour déclencher et maintenir le fonctionnement d’une machine ou d’éléments d’une machine, exige au moins que les deux mains actionnent simultanément deux organes de service, assurant ainsi la protection de la personne qui actionne les organes de service.
b) EN 292-2 : Sécurité des machines – Notions fondamentales, principes généraux de conception
Partie 2 : principes et spécifications techniques
Extraits : Cas où l’accès d’un opérateur à la zone dangereuse est nécessaire pendant le fonctionnement normal.
Lorsque l’accès à la zone dangereuse est nécessaire pendant le fonctionnement normal de la machine, il convient de choisir les moyens de protection parmi les suivants :
Commande bimanuelle (voir commande bimanuelle dans l’EN 292-1) :
Lorsqu’on choisit ce dispositif, il doit être tenu compte du fait qu’il protège seulement la personne qui actionne les organes de service et n’empêche pas d’autres personnes situées à proximité d’accéder aux zones dangereuses.
c) EN 574 : Sécurité des machines – Dispositifs de commande bimanuelle – Aspects fonctionnels
– Principes de conception.
Extraits : – Un dispositif de commande bimanuelle constitue une mesure de protection pour l’opérateur contre l’atteinte des zones dangereuses, durant les situations dangereuses, en plaçant les organes de service dans une position particulière.
Le choix d’un dispositif de commande bimanuelle dépendra de l’appréciation du risque effectuée par les concepteurs, les normalisateurs ou d’autres personnes, conformément à l’EN 292-1 et au EN 1050.
– Cette norme spécifie les prescriptions de sécurité que doivent présenter les dispositifs de commande bimanuelle en tant que dispositif de protection requérant les deux mains d’une personne pour déclencher et aussi entretenir, tant que des situations dangereuses existent, le fonctionnement d’une machine, assurant ainsi une mesure de protection seulement pour cette personne.
– Cette norme s’applique à tous dispositifs de commande bimanuelle, indépendamment de l’énergie utilisée, y compris :
– aux dispositifs de commande bimanuelle intégrés ou non à une machine,
– aux dispositifs de commande bimanuelle en un ou plusieurs éléments séparés.
Extraits : Il existe différents types de commande bimanuelle :
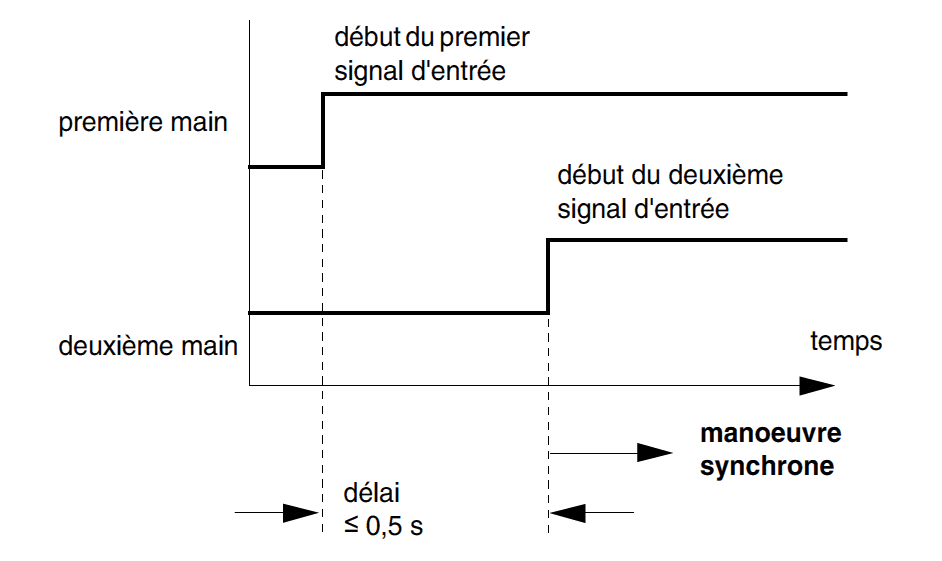
Manœuvre synchrone
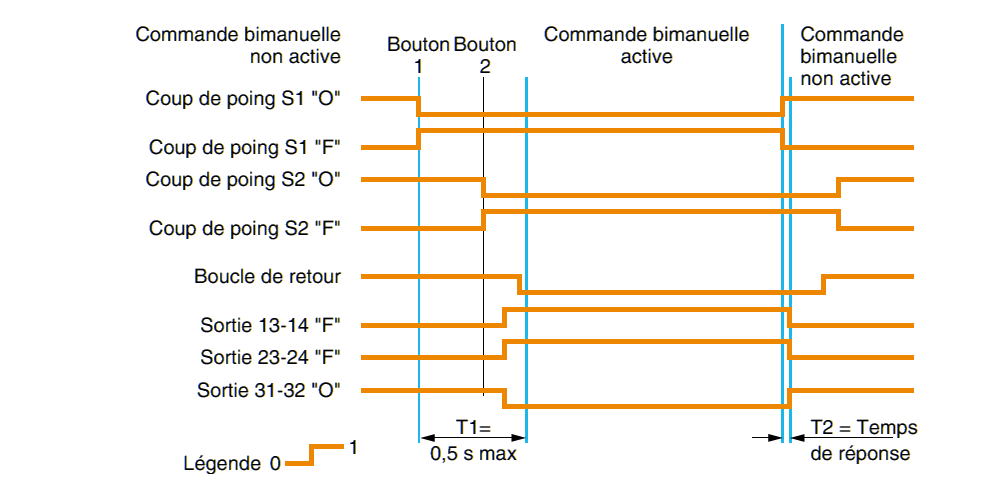
Un signal de sortie ne doit être engendré que lorsque les deux organes de service sont manœuvrés avec un délai de temps inférieur ou égal à 0,5 s.
Remarque : dans le cas où deux ou plusieurs dispositifs de commande bimanuelle sont utilisés pour faire fonctionner une machine, l’action synchrone est requise seulement pour chaque dispositif de commande bimanuelle, mais elle n’est pas requise entre ces dispositifs.
Tous les pupitres XY2-SB•• associés au module XPS-BC sont à manoeuvre synchrone, les 2 actionneurs n’autorisant un départ cycle de la machine que s’ils sont actionnés en moins de 0,5 s.
EN 574 (suite) :
Extraits : Protection contre la manœuvre accidentelle et la fraude.
Les organes de service d’un dispositif de commande bimanuelle doivent être conçus et disposés de manière à ce qu’il soit difficile de “frauder” la protection offerte par le dispositif de commande bimanuelle et à minimiser la probabilité de manœuvre accidentelle, conformément à l’appréciation du risque dans l’application particulière.
L’usage d’une seule main, les combinaisons possibles d’une main et/ ou d’autres parties du corps, et/ ou l’usage de moyens auxiliaires simples qui permettent la fraude doivent être pris en considération, de façon à ce qu’il soit impossible d’atteindre la zone dangereuse durant une situation dangereuse.
La manœuvre accidentelle (par ex. par les vêtements de l’opérateur) doit être prise en compte de la même façon.
> Fraude avec une seule main
Des mesures empêchant la fraude par l’usage d’une seule main doivent être mises en œuvre :
– Écartement des organes de service (dimension interne) d’au moins 260 mm.
> Fraude avec une main et le coude du même bras
Des mesures empêchant la fraude par usage d’une main et du coude de la même main doivent être mises en œuvre :
– Capots conçus de telle sorte que les organes de service ne puissent être manœuvrés du coude.
> Fraude avec une main et d’autres parties du corps (par ex. genou, hanche)
Des mesures empêchant la fraude par usage d’autres parties du corps en combinaison avec une main doivent être mises en œuvre.
Des exemples de mesures appropriées sont les suivants :
– Disposition des organes de service sur une surface horizontale ou quasi horizontale située à au moins 1100 mm au-dessus du sol ou d’une plate-forme d’accès.
Cette disposition est destinée à empêcher la manœuvre par la hanche.
– En cas d’implantation sur une surface verticale ou quasi verticale, adaptation d’une collerette protectrice autour des organes de service.
– Capots et/ ou écrans conçus de telle manière que les organes de service ne puissent pas être manœuvrés d’une main et d’une autre partie du corps.
Remarque : les pupitres de commande bimanuelle XY2-SB•• répondent à ces prescriptions de protection contre la manœuvre accidentelle et la fraude.
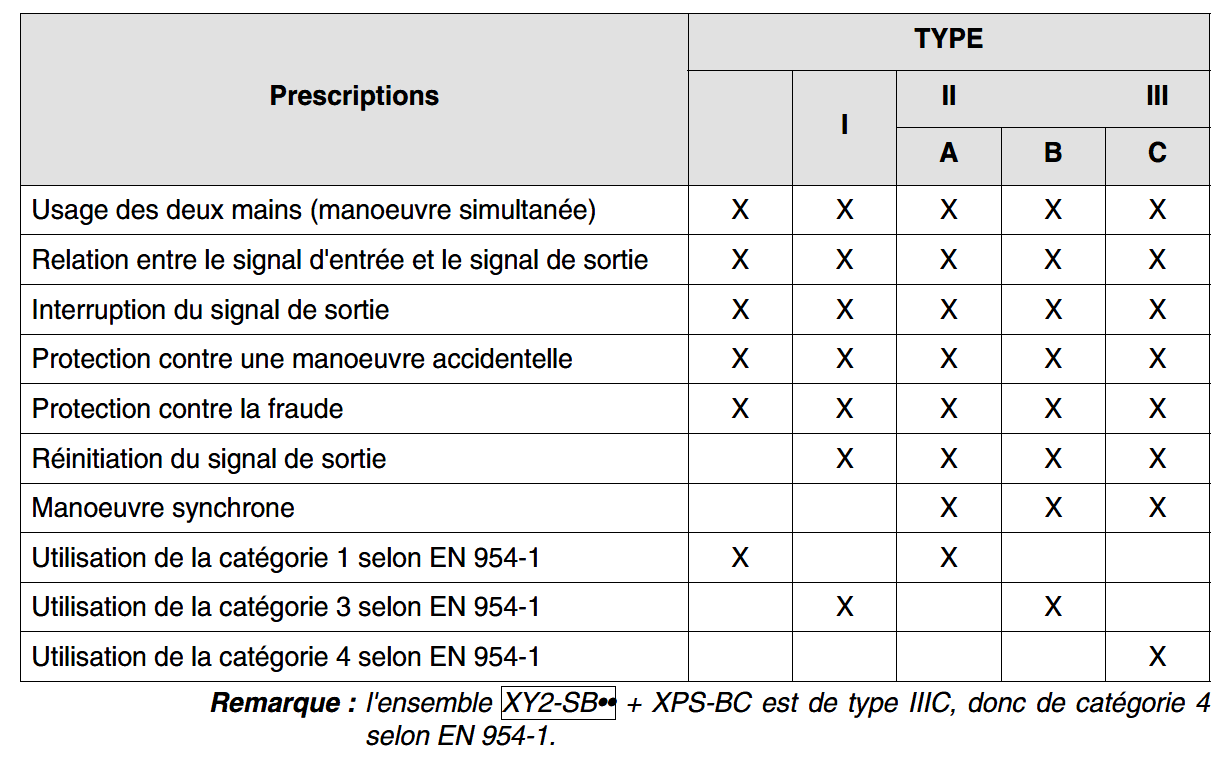
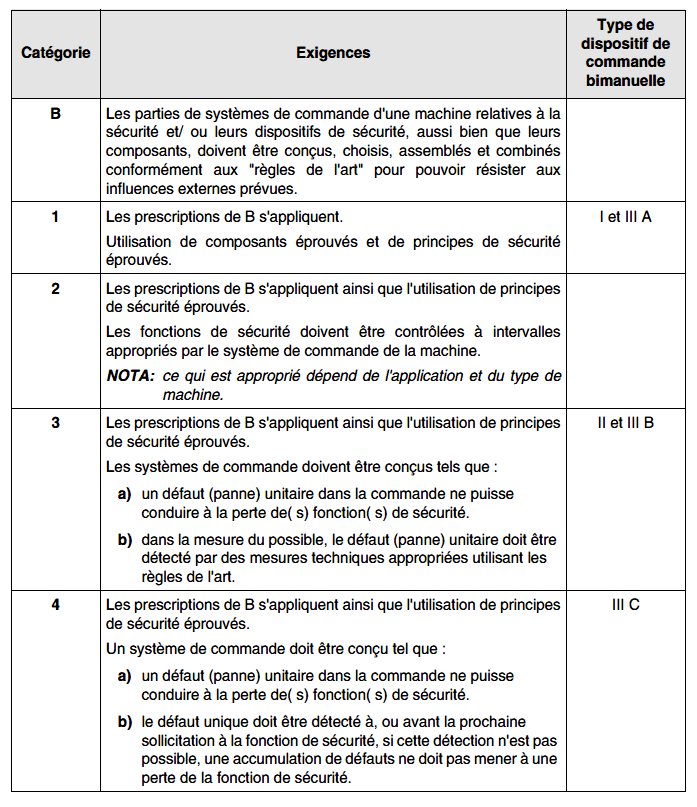
Annexe B (informative) de la EN 574
Correspondance entre les dispositifs de commande bimanuelle et les catégories de commande :
Le tableau suivant indique les types de dispositif de commande bimanuelle définis et leur correspondance avec les catégories suivant EN 954-1.
d) Décret français 81-938 : décret n° 81-938 du 13 octobre 1981 définissant les conditions d’hygiène
et de sécurité auxquelles doivent satisfaire les presses et les cisailles guillotines pour le travail des métaux à froid, ainsi que les dispositifs protecteurs construits pour ces machines.
Art. 3. — La mise en marche des éléments mobiles de travail doit toujours procéder d’un apport d’énergie.
L’arrêt de ces éléments mobiles doit être provoqué automatiquement et intervenir rapidement dès que l’apport d’énergie cesse ou devient insuffisant.
Art. 6. — Les éléments mobiles de travail doivent être rendus inaccessibles pendant leur fonctionnement. Si cette inaccessibilité n’est pas assurée par la construction même de la machine, elle doit résulter de dispositifs protecteurs tels que : écrans fixes ou mobiles, barrages immatériels, commandes bimanuelles de sécurité, ou tous autres moyens assurant une sécurité équivalente.
Art. 9. — Chaque commande bimanuelle doit être conçue et construite de manière à satisfaire aux conditions suivantes :
1° Les organes de service de la commande bimanuelle doivent être réalisés et disposés de manière à ne pouvoir fonctionner que par l’action des deux mains de l’opérateur.
2° Seul un appui simultané des deux mains de l’opérateur sur la commande bimanuelle doit pouvoir déclencher la mise en marche des éléments mobiles de travail.
3° Le mouvement des organes de service de la commande bimanuelle doit être synchronisé afin que la neutralisation éventuelle de l’un d’eux rende impossible la commande de mise en marche des éléments mobiles de travail.
4° Toute interruption de la pression sur l’un des deux organes de service de la commande bimanuelle doit provoquer l’arrêt des éléments mobiles de travail.
Lorsqu’une machine est équipée de plusieurs commandes bimanuelles, la mise en marche de ses éléments mobiles de travail ne doit s’effectuer que si tous les opérateurs ont actionné les organes de service de toutes les commandes bimanuelles utilisées en fonction du mode opératoire retenu.
Art. 10. — Dans les cas de fonctionnement de la machine en marche continue ou en marche automatique, l’inaccessibilité des éléments mobiles de travail doit être assurée par des écrans fixes ou mobiles, à l’exclusion des barrages immatériels et des commandes bimanuelles.
Machines concernées
La commande bimanuelle s’applique à de nombreuses machines, fonctionnant notamment en coup par coup.
Exemples :
– Cisailles-guillotines.
– Presses hydrauliques.
– Tous types de presses mécaniques, à l’exclusion des presses à clavette.
– Presses de reprise.
– Postes de soudage.
– etc…
Principales caractéristiques techniques
> Déphasage maximal d’actions sur les 2 organes de service actionneurs permettant l’obtention du
signal de sortie : 500 ms.
> Effort d’actionnement à appliquer sur chacun des 2 actionneurs : 15 N.
> Nombre et nature des contacts de sécurité : 1“ O” + 1“ F” (dépendants) sur chaque actionneur.
> Degré de protection : IP 65.
> Température de l’air ambiant : -25…+ 70 °C.
> Tenue aux vibrations : 5 gn (2… 500 Hz) selon IEC 68-2-6.
> Tenue aux chocs : 10 gn selon IEC 68-2-27.
> Caractéristiques assignées d’emploi :
– AC15 : A600 (AC).
– DC13 : Q600 (DC).
> Les pupitres XY2-SB74, XY2-SB78, XY2-SB62, XY2-SB66 sont pré câblés. Les différents contacts de S1, S2 et S3 sont raccordés électriquement à un bornier, selon schéma de principe ci-dessous :
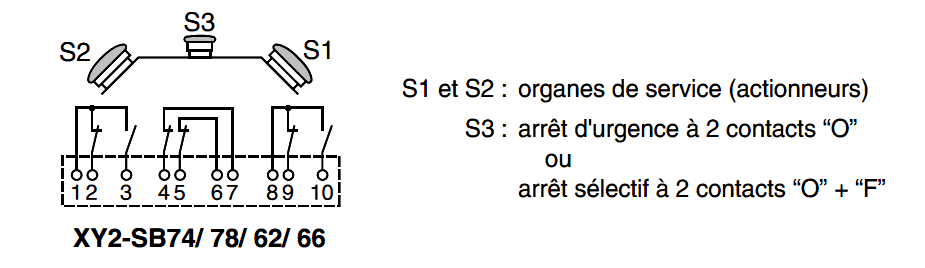
Il reste à l’utilisateur à raccorder électriquement le bornier du pupitre aux modules de sécurité Preventa XPS-BC.
Références possibles :
– XPS-BC1110 ( 24 V DC).
– XPS-BC3410 (115 V AC).
– XPS-BC3710 (230 V AC).
Installation
Dispositions réglementaires EN 999 :
– T1 : sécurité des machines.
– T2 : vitesse main/ bras – vitesse d’approche des parties du corps.
– T3 : positionnement des dispositifs de protection.
Extraits : Le présent document définit les éléments à prendre en considération pour évaluer le temps d’obtention de l’arrêt et le temps d’accès à des éléments mobiles d’une machine en fonction des dispositifs de protection mis en œuvre dans le cadre des dispositions réglementaires en vigueur en matière de prévention des accidents du travail.
Formule générale
La distance minimum par rapport à la zone de danger devra être calculée en utilisant la formule suivante :
S = (K x T) + C
Dans laquelle :
> S est la distance de sécurité minimum en mm entre la zone de danger et le point, l’axe ou le plan de détection.
> K est la constante en mm par seconde, calculée à partir des vitesses d’approche du corps ou d’une partie du corps.
> T est le temps de réponse global en secondes.
> C est la distance supplémentaire en mm, calculée à partir d’une intrusion vers la zone de danger avant l’excitation du DPES.
Organes de commandes bimanuelles
La distance de sécurité minimum entre la zone de danger et l’actionneur le plus proche doit être calculée en utilisant la formule :
S = (K x T) + C
Dans laquelle :
K = 1600 mm/s.
C = 250 mm.
C’est-à-dire : S = 1600 x T + 250
Dans la mesure où le risque d’entraînement du corps ou d’une partie du corps vers la zone de danger est limité pendant que le dispositif est actionné, par exemple, à l’aide d’un écran adéquat, C peut être égal à 0, avec une distance minimum acceptable pour S égale à 100 mm.
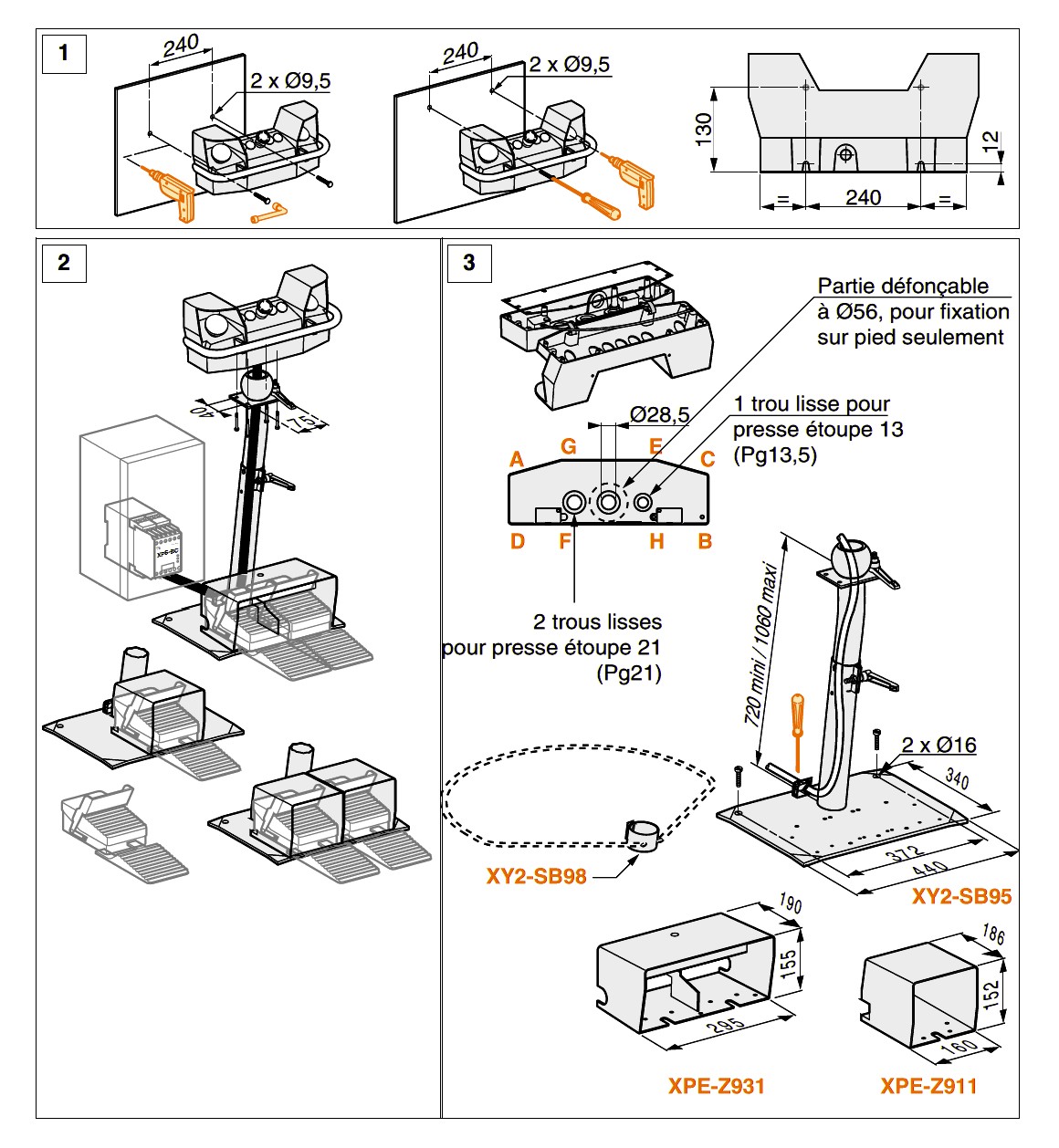
(1) Fixation verticale directement sur le bâti de la machine au moyen des trous réservés à cet usage.
(2) Fixation horizontale sur le pied XY2-SB95. Quatre trous pré positionnés sont à percer par l’utilisateur : perçage Ø 6,5 préconisé.
(3) Pour accéder aux bornes de contacts, ouvrir le pupitre de commande après desserrage des vis intérieures.
Emploi du collier pour protecteur XY2-SB98
Le collier XY2-SB98 permet de monter un arceau de sécurité dont la distance de sécurité S est à calculer suivant la formule :
S = 1600 T + 250
S est la distance de sécurité minimum en mm entre la zone de danger et le point, l’axe ou le plan de détection.
T est le temps de réponse global en secondes.
Raccordement électrique
Pupitre
La continuité de terre entre le couvercle et le fond du pupitre doit être assurée lors de l’installation.
Il faut raccorder un fil de 2,5 mm 2 sur les bornes repérées “Terre”.
Entrées de câble
Face inférieure :
– 2 trous lisses pour presse étoupe 21 (Pg21, pour ISO M25, utiliser l’adaptateur DE9-RA2125 et l’écrou DE9-EC21).
– 1 trou lisse pour presse étoupe 13 (Pg13,5 ou ISO M20).
Face arrière :
– 1 trou lisse pour presse-étoupe 13 (Pg13,5 ou ISO M20).
Le câble de raccordement doit avoir un diamètre extérieur compatible avec les presse-étoupes pour obtenir l’efficacité correcte du dispositif anti-arrachement (les presse-étoupes sont non fournis).
Liaison pupitre XY2-SB•• / module Preventa XPS-BC
Le câble doit être blindé et le blindage doit être relié à la masse par une seule de ses extrémités
Prendre les précautions d’usage afin d’éviter le sectionnement du câble.
Extrait de la publication INRS : ED 017 (1988)
Le câble de liaison des pupitres mobiles étant soumis à des contraintes mécaniques sévères, il est important que la coupure ou le court-circuit de leurs conducteurs soient automatiquement contrôlés.
A cet effet, les blocs logiques ne prévoyant que le contrôle de leurs propres liaisons aux organes de service et non de leurs sorties, il est impératif de les monter dans l’armoire de commande.
Par ailleurs, le câble de liaison doit être blindé non seulement pour des raisons de protection mécanique, mais aussi pour protéger le circuit contre les courants induits en milieu fortement perturbé du point de vue électromagnétique.
A cet effet, il y a lieu de relier ce blindage à la masse par une seule de ses extrémités, étant bien
entendu qu’il ne sert pas de conducteur de protection, ce dernier étant obligatoirement intégré au câble et relié à la masse côté pupitre et à la borne de terre côté armoire de commande.
Dans le cas où le pupitre comporte d’autres organes de service que ceux de la commande bimanuelle
à proprement parler, il y a lieu de s’assurer que les courts-circuits possibles avec ces autres liaisons
électriques (bouton d’arrêt par exemple) n’entraînent pas un fonctionnement anormal du bloc logique.
Dans l’affirmative, il y a lieu de dissocier leurs liaisons respectives en les faisant passer dans des
câbles différents.
Schéma de raccordement pour poste de commande bimanuelle XPS-BC
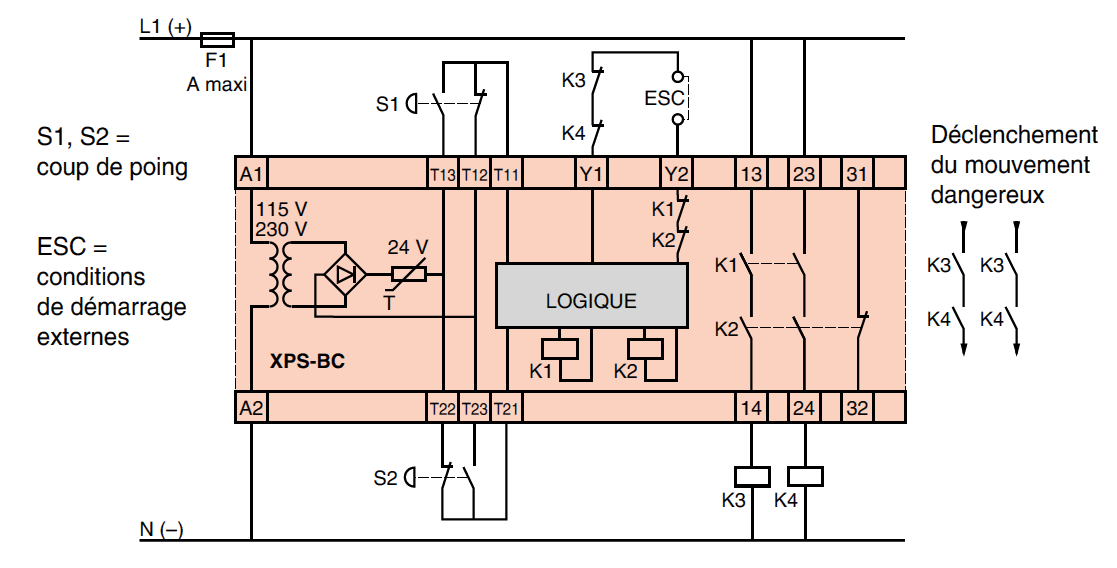
Diagramme fonctionnel du XPS-BC
Mise en service
> Il faut s’assurer que le pupitre XY2-SB•• ne soit pas aisément démontable : il doit être fixé de manière rigide et à la distance de sécurité S calculée.
> Le pupitre doit être positionné de manière à procurer un confort maximal à l’opérateur.
> Il faut veiller à ce que le câble de liaison pupitre / module soit correctement installé.
> Il faut veiller à ce que le module XPS-BC soit bien installé dans l’armoire de commande contrôle de la machine.
> Procéder à quelques simulations de défauts, de manière à être certain que ceux-ci sont effectivement détectés, soit :
– par l’arrêt immédiat du mouvement dangereux au temps de réponse prêt des organes en mouvement (ex : descente du coulisseau, déplacement d’un robot…).
– par l’interdiction de l’ordre de mise en marche du mouvement dangereux.
Exemples de simulations de défauts
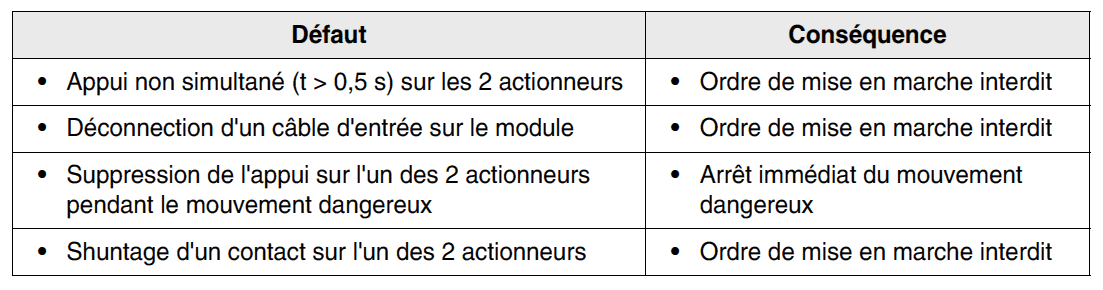
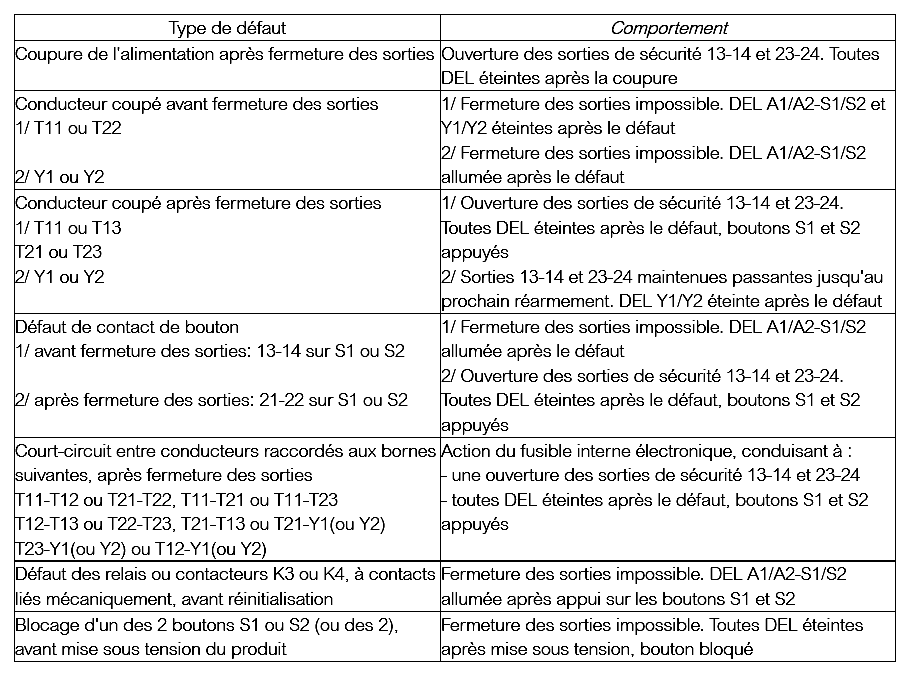
Tableau exhaustif des occurrences de défaut et leur traitement par le module XPS-BC
Opérations de maintenance
Il est préconisé une visite d’entretien trimestriel du circuit de commande de la commande bimanuelle :
> Vérification du serrage des différents presse-étoupes.
> Vérification de l’état du câble de liaison pupitre, module de sécurité.
> Une fois par an, en plus des vérifications mentionnées ci-dessus :
> Vérifier le temps d’arrêt effectif de la machine en particulier s’il s’agit d’une presse.
> Vérifier les fixations du pupitre de commande bimanuelle.
> Vérifier les contacts des sorties : relais ou contacteurs à contacts liés mécaniquement.
