Altivar 312
Altivar 312 : Variateurs de vitesse pour moteurs asynchrones triphasés de 0,18 à 15 kW
Le variateur Altivar 312 de Schneider Electric est un convertisseur de fréquence pour des moteurs asynchrones triphasés 200…600 V de 0,18 à 15 kW.
Le variateur Altivar 312 est robuste, compact et facile à installer.
Ses fonctions intégrées sont particulièrement adaptées pour répondre aux applications de machines industrielles simples.
La prise en compte des contraintes de mise en œuvre et d’utilisation du produit dès la conception permet de proposer une solution économique et fiable aux constructeurs de machines simples et aux installateurs.
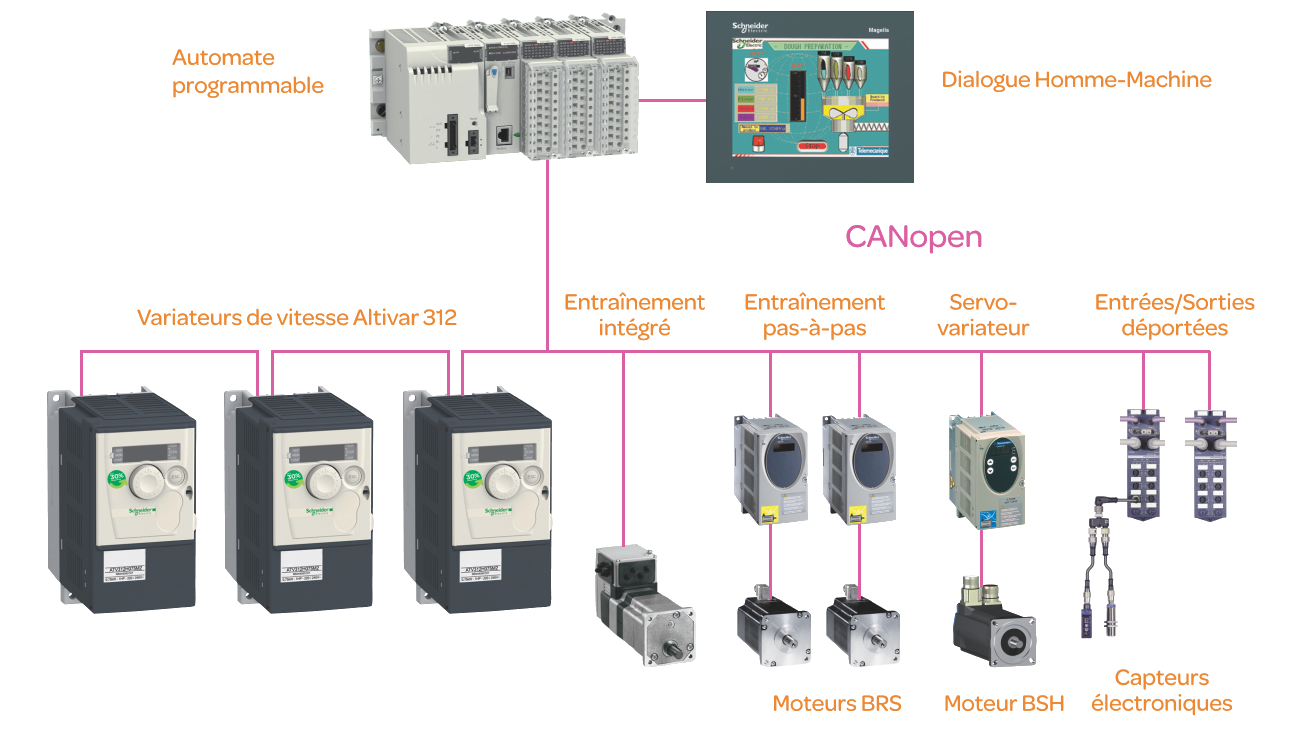
Avec ses différentes cartes de communication disponibles en option, le variateur Altivar 312 s’intègre parfaitement dans les principales architectures d’automatisme.

Exemples de solutions apportées :
– Nombreuses possibilités de chargement, d’édition, de sauvegarde des configurations du variateur à l’aide de différents outils tels le logiciel de mise en service SoMove, le logiciel SoMove Mobile pour téléphone portable. – Les terminaux déportés et les outils de configuration “Simple Loader” et “Multi-Loader”.
– Adaptation aux bus et réseaux de communication industriels en remplaçant simplement la carte entrées/sorties de contrôle du variateur par l’une des cartes de communication.
– Ergonomie identique à la gamme des variateurs de vitesse Altivar 12 facilitant la mise en œuvre avec une adaptation rapide des différents intervenants.
Applications
Le variateur Altivar 312 intègre des fonctions répondant aux applications les plus courantes, notamment :
> Manutention (petits convoyeurs, palans, …).
> Machines d’emballage et de conditionnement (petites ensacheuses, étiqueteuses, …).
> Machines spéciales (mélangeurs, malaxeurs, machines textiles, …).
> Pompe, compresseur, ventilateur.
> …
Fonctions principales
Le variateur Altivar 312 dispose de six entrées logiques, de trois entrées analogiques, d’une sortie logique/analogique et de deux sorties à relais.
Les principales fonctions disponibles sont les suivantes :
> Protection du moteur et du variateur.
> Rampes d’accélération et de décélération linéaires, en S, en U ou personnalisées.
> Commande locale de la référence vitesse avec le bouton de navigation.
> Plus vite/moins vite.
> 16 vitesses présélectionnées.
> Consignes et régulateur PI.
> Commande 2 fils/3 fils.
> Logique de frein.
> Rattrapage automatique avec recherche de vitesse et redémarrage automatique.
> Configuration des défauts et des types d’arrêt.
> Sauvegarde de la configuration dans le variateur.
Plusieurs fonctions peuvent être affectées sur une même entrée logique.
La gamme
La gamme des variateurs Altivar 312 couvre les puissances moteur comprises entre 0,18 kW et 15 kW selon 4 types de réseaux d’alimentation :
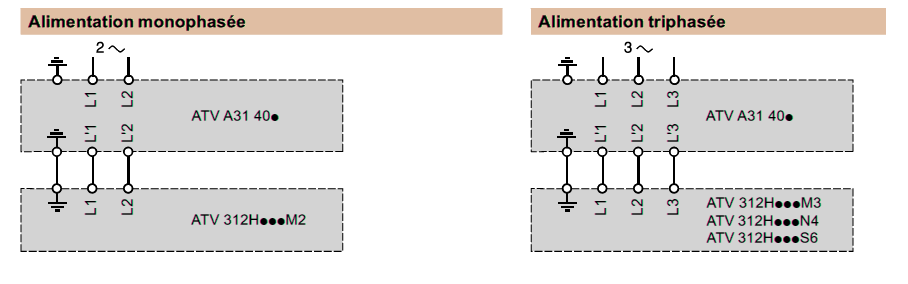
> 200 V…240 V monophasé, de 0,18 kW à 2,2 kW (ATV 312H…M2).
> 200 V…240 V triphasé, de 0,18 kW à 15 kW (ATV 312H…M3).
> 380 V…500 V triphasé, de 0,37 kW à 15 kW (ATV 312H…N4).
> 525 V…600 V triphasé, de 0,75 kW à 15 kW (ATV 312H…S6).
Il est possible de monter plusieurs variateurs côte à côte pour permettre un gain de place.
Le variateur Altivar 312 intègre en standard les protocoles de communication Modbus et CANopen.
Ils sont accessibles par la prise de type RJ45 située sous le variateur.
En complément aux protocoles Modbus et CANopen accessibles en standard, le variateur Altivar 312 peut se connecter sur les principaux bus et réseaux de communication industriels en remplaçant la carte entrées/sorties de contrôle du variateur par l’une des cartes de communication disponibles en option :
> Daisy chain (chaînage).
> DeviceNet.
> PROFIBUS DP.
Le réseau Modbus TCP et le bus Fipio sont également accessibles via des passerelles dédiées.
Description
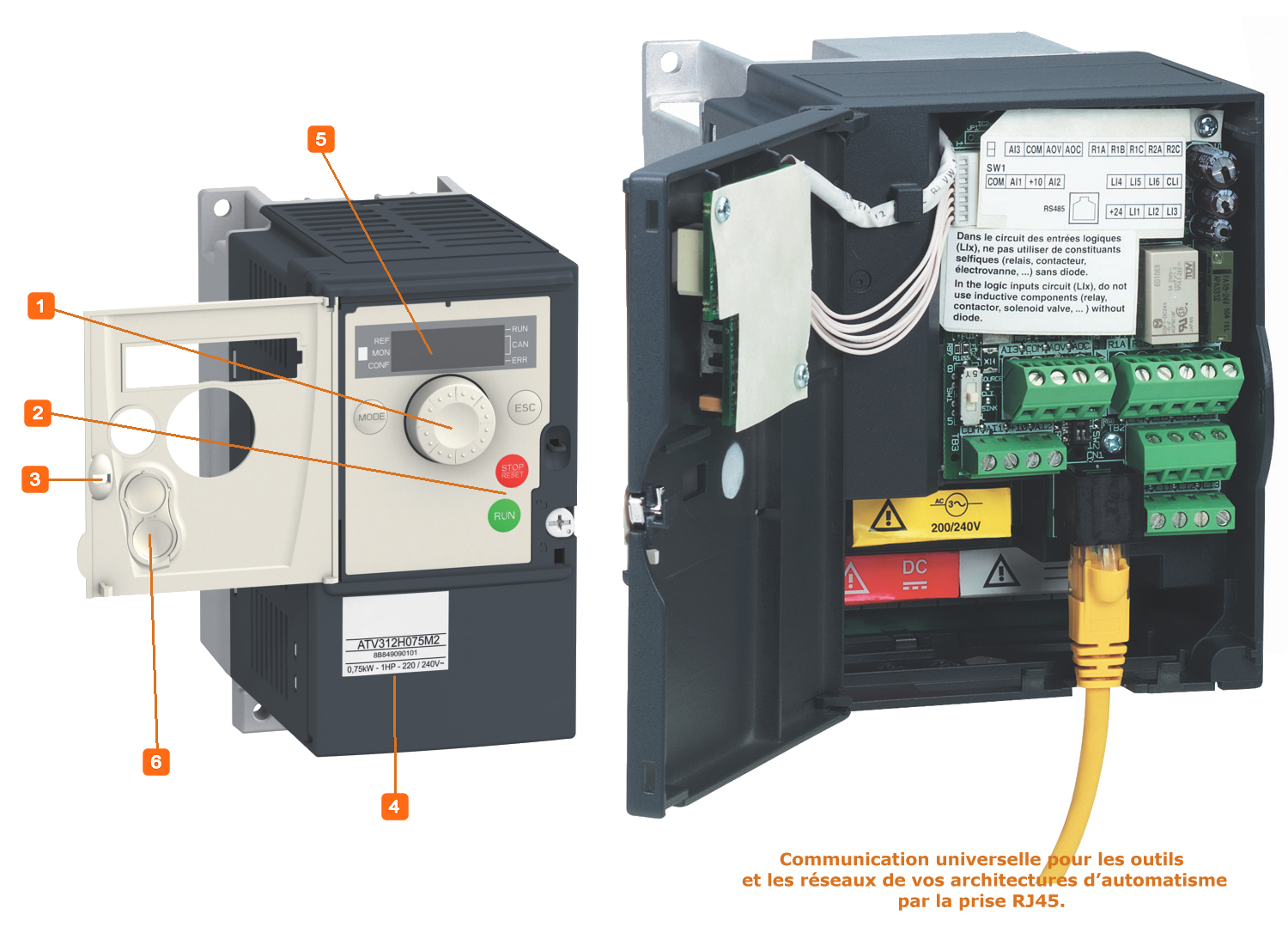
(1) Bouton de navigation simplifiée : Il permet de naviguer dans les menus, de modifier les valeurs et de modifier la vitesse du moteur en mode local.
(2) Commandes Marche-Arrêt : Les touches “RUN” et “STOP/RESET” permettent de commander la marche et
l’arrêt du moteur en mode local. Ces deux touches peuvent être rendues accessibles en face avant en ôtant l’obturateur (6) de la porte.
(3) Verrouillage possible par plombage.
(4) Zone de marquage.
(5) Afficheur à 4 digits permet d’afficher les états, les défauts et les valeurs des paramètres du variateur.
L’ensemble de la gamme est conforme aux normes internationales IEC 61800-5-1, IEC 61800-2 et IEC 61800-3, aux certifications UL, CSA, C-Tick, NOM et GOST et a été développé pour répondre aux directives de l’environnement (RoHS) ainsi qu’aux Directives Européennes pour recevoir le marquage CE.
Compatibilité électromagnétique CEM
L’incorporation de filtres CEM dans les variateurs ATV 312H…M2 et ATV 312H…N4 et la prise en compte CEM facilitent. Ce filtre est déconnectable via un cavalier ou un fil à cosse à déplacer.
Les variateurs ATV 312H…M3 et ATV 312H…S6 sont conçus sans filtre CEM.
Des filtres, proposés en option, peuvent être installés pour réduire le niveau d’émissions des variateurs ATV 312H…M2, ATV 312H…M3 et ATV 312H…N4
Accessoires et options externes
Des accessoires et options externes peuvent être associés au variateur Altivar 312 :
– Kits pour conformité UL Type 1.
– Platines pour montage sur profilés symétrique 35 mm.
– Résistances de freinage.
– Inductances de ligne.
– Filtres CEM additionnels d’entrée, filtres de sortie, …
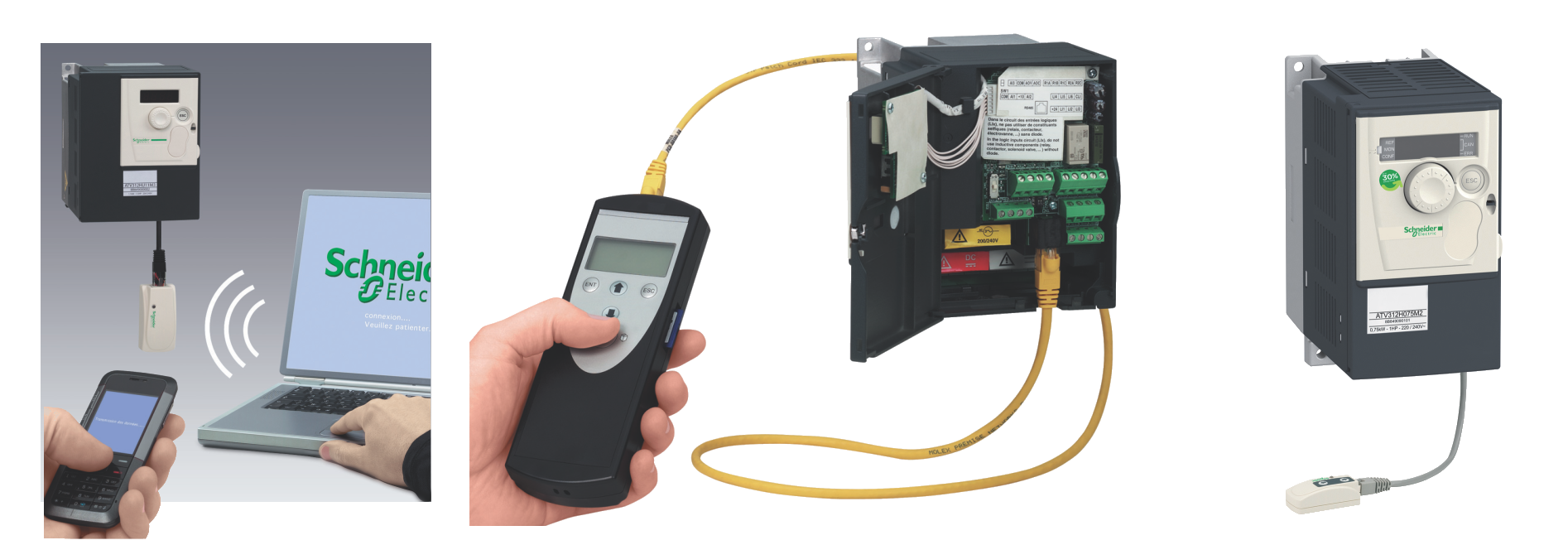
Outils de dialogue et de configuration
Terminaux de dialogue
Le variateur Altivar 312 peut être raccordé à un terminal déporté ou à un terminal graphique déportable, disponibles en option.
Le terminal déporté peut être monté sur une porte d’enveloppe avec un degré de protection IP 54 ou IP 65.
Il donne accès aux mêmes fonctions que l’interface Homme-Machine.
Le terminal graphique déportable, avec son affichage “plein texte” dans la langue de l’utilisateur, offre un confort d’utilisation pour les phases de configuration, de mise au point ou de maintenance.

(1) Terminal déporté avec cache ouvert : touches “RUN”, “FWD/REV” et “STOP/RESET” accessibles (existe aussi avec cache fermé).
(2) Terminal graphique déportable.
Logiciel de mise en service SoMove
Le logiciel de mise en service SoMove permet de configurer, de régler, d’effectuer la mise au point avec la fonction “Oscilloscope” ainsi que la maintenance du variateur Altivar 312, comme pour l’ensemble des autres variateurs de vitesse et démarreurs Schneider Electric.
Deux moyens sont prévus pour charger la configuration :
> Direct du PC vers le variateur avec un câble USB/RJ45.
> Sans PC, via une carte mémoire de type SD à l’aide de l’outil Multi-Loader (voir ci-dessous).
Outils de configuration “Simple Loader” et “Multi-Loader”
L’outil “Simple Loader” permet de dupliquer la configuration d’un variateur sous tension vers un autre variateur sous tension.
L’outil “Multi-Loader” permet de copier des configurations à partir d’un PC ou d’un variateur sous tension et de les dupliquer vers un autre variateur sous tension.
Téléphone mobile connexion sans fil Bluetooth
Téléchargement et envoi des configurations.
> Réglage et maintenance des variateurs.
> Envoi et réception des fichiers de configuration localement ou à distance.
> Plus besoin d’ouvrir les armoires électriques.
> Permet de conserver les modifications ou réinstaller les configurations sauvegardées.
> Fonctions de dialogue avec SoMove Mobile.
> Partage des fichiers de configuration via MMS ou e-mail.
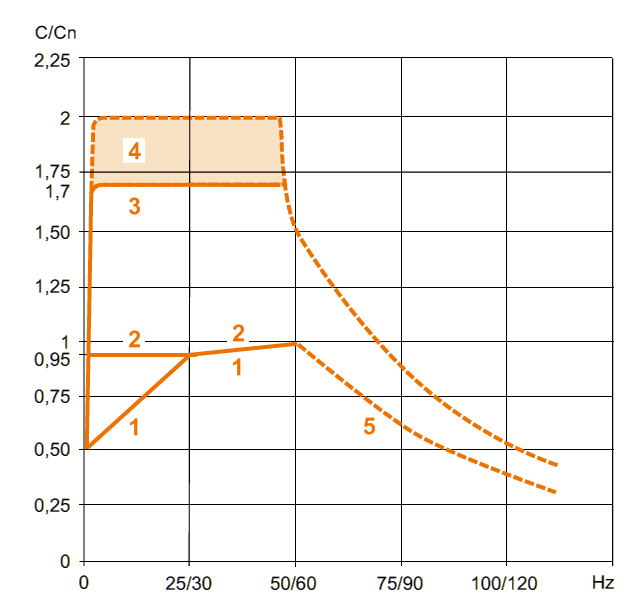
Caractéristiques de couple (courbes typiques)
Les courbes ci-dessous définissent le couple permanent et le surcouple transitoire disponibles, soit sur un moteur auto ventilé, soit sur un moteur moto ventilé.
La différence réside uniquement dans l’aptitude du moteur à fournir un couple permanent important en-dessous de la moitié de la vitesse nominale.
(1) Moteur auto ventilé : couple utile permanent (a).
(2) Moteur moto ventilé : couple utile permanent.
(3) Surcouple transitoire pendant 60 s.
(4) Surcouple transitoire pendant 2 s.
(5) Couple en survitesse à puissance constante (b).
(a) Pour les puissances ≤ 250 W, le déclassement est moins important (20 % au lieu de 50 % à très basse fréquence).
(b) La fréquence nominale du moteur et la fréquence maximale de sortie sont réglables de 40 à 500 Hz.
Il faut s’assurer auprès du constructeur des possibilités mécaniques de survitesse du moteur choisi.
Utilisations particulières
Utilisation avec un moteur de puissance différente du calibre du variateur
L’appareil peut alimenter tout moteur de puissance inférieure à celle pour laquelle il a été prévu.
Pour des puissances de moteurs légèrement supérieures au calibre du variateur, il faut s’assurer que le courant absorbé ne dépasse pas le courant de sortie permanent du variateur.
Essai sur moteur de faible puissance ou sans moteur
Dans un environnement de test ou de maintenance, le variateur peut être vérifié sans avoir recours à un moteur équivalent au calibre du variateur (en particulier pour les variateurs de fortes puissances).
Cette utilisation nécessite de désactiver la détection de perte phase moteur.
Association de moteurs en parallèle
Le calibre du variateur doit être supérieur ou égal à la somme des courants et des puissances des moteurs à commander.
Dans ce cas, il faut prévoir pour chaque moteur une protection thermique externe par sondes ou relais thermique.
Si le nombre de moteurs en parallèle est supérieur ou égal à 3, il est recommandé d’installer une inductance moteur entre le variateur et les moteurs.
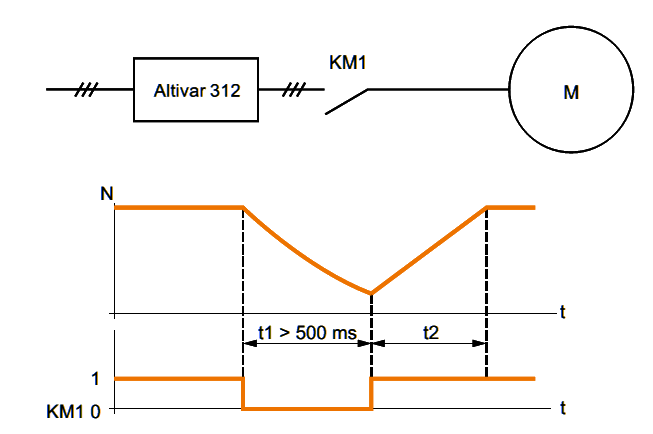
Commutation du moteur en sortie du variateur
La commutation peut être réalisée variateur verrouillé ou non.
Lors d’une commutation à la volée (variateur déverrouillé), le moteur est piloté et accéléré jusqu’à la vitesse de consigne sans à-coup en suivant la rampe d’accélération.
Cette utilisation nécessite de configurer le rattrapage automatique (“reprise à la volée”) et d’activer la fonction qui gère la présence d’un contacteur aval.
Nota : selon le calibre du variateur, il peut être nécessaire d’insérer des ferrites de protection aval entre le variateur et le contacteur aval.
Applications typiques : coupure de sécurité en sortie du variateur, fonction “by-pass”, commutation de moteurs en parallèle.
Recommandations d’emploi : synchroniser la commande du contacteur aval avec celle d’une demande d’arrêt en roue libre du variateur sur entrée logique.
Exemple de coupure du contacteur aval
KM1 : contacteur.
t1 : temps d’ouverture de KM1 (moteur en roue libre).
t2 : accélération avec rampe.
N : vitesse.
Bus et réseaux de communication
Le variateur Altivar 312 est conçu pour répondre aux configurations rencontrées dans les principales installations industrielles communicantes.
Il intègre en standard les protocoles de communication Modbus et CANopen.
Il peut également se connecter sur d’autres bus et réseaux de communication industriels en utilisant l’une des cartes de communication ou l’un des coupleurs proposés en option.
Configuration standard
Le variateur Altivar 312 est équipé d’une carte entrées/sorties de contrôle qui intègre :
– Un bornier entrées/sorties comprenant :
> Six entrées logiques : LI1 à LI6.
> Trois entrées analogiques : AI1 à AI3.
> Deux sorties analogiques : AOV et AOC (l’une ou l’autre utilisable).
> Deux sorties à relais : R1 et R2.
> Un port de communication Modbus/CANopen, accessible sur un connecteur de type RJ45.
Le port de communication Modbus/CANopen est dédié au contrôle et à la commande du variateur par un automate programmable ou par un autre type de contrôleur.
Il permet également le raccordement des outils de dialogue et de configuration :
> Terminal déporté.
> Terminal graphique déportable.
> Logiciel de mise en service SoMove.
> Logiciel SoMove Mobile pour téléphone portable.
> Outils de configuration “Simple Loader” et “Multi-Loader”.

Cartes de communication dédiées industrie
Plusieurs cartes de communication dédiées industrie 2 sont disponibles en option.
Ces cartes sont utilisées en remplacement de la carte entrées/sorties de contrôle 1 du variateur.
Les cartes de communication disponibles sont :
> Carte CANopen Daisy chain (solution optimisée pour le raccordement par chaînage sur bus machine CANopen).
> Carte DeviceNet.
> Carte PROFIBUS DP.
Coupleurs de communication
Le variateur Altivar 312 peut se connecter à d’autres bus et réseaux de communication par l’intermédiaire de coupleurs disponibles en option :
> Réseau Modbus TCP par l’intermédiaire du bridge Ethernet/Modbus.
> Bus Fipio par l’intermédiaire de la passerelle Fipio/Modbus.

Toutes les fonctions du variateur Altivar 312 sont accessibles par les bus et les réseaux de communication :
> La commande.
> La surveillance.
> Le réglage.
> La configuration.
La commande et la consigne de vitesse peuvent provenir de différentes sources de contrôle :
> Borniers d’entrées logiques ou d’entrées/sorties analogiques.
> Bus ou réseau de communication.
> Terminal déporté.
Les fonctions avancées du variateur Altivar 312 permettent de gérer la commutation de ces sources de contrôle suivant les besoins de l’application.
Il est possible de choisir l’affectation des données d’entrées/sorties périodiques de communication par le logiciel de configuration du réseau.
Le variateur Altivar 312 est piloté suivant le profil natif CiA 402.
La surveillance de la communication est effectuée selon des critères spécifiques à chaque protocole.
Cependant, quel que soit le protocole, il est possible de configurer la réaction du variateur, suite à un défaut de communication :
> Arrêt roue libre, arrêt sur rampe, arrêt rapide ou arrêt freiné.
> Maintien du dernier ordre reçu.
> Position de repli à une vitesse prédéfinie.
> Ignorer le défaut.
Logiciel de mise en service SoMove
SoMove est un logiciel de mise en service convivial pour PC, destiné à la mise en œuvre des appareils de commande moteur Schneider Electric suivants :
– Variateurs de vitesse ATV 12, ATV 312, ATV 31, ATV 32, ATV 61 et ATV 71.
– Démarreurs ATS 22.
– Démarreurs-contrôleurs TeSys U.
– Système de gestion de moteurs TeSys T.
– Servo variateurs Lexium 32.
Le logiciel SoMove intègre différentes fonctionnalités destinées aux phases de mise en œuvre de l’appareil, telles que :
> La préparation des configurations.
> La mise en service.
> La maintenance.
Écran d’accueil du logiciel SoMove
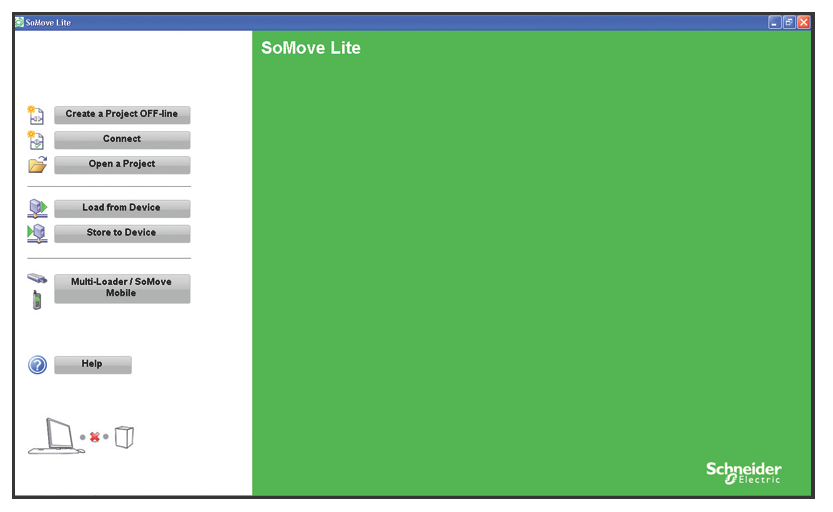
Afin de faciliter les phases de mise en service et de maintenance, le logiciel SoMove peut utiliser une liaison directe par cordon USB/RJ45 ou une liaison sans fil Bluetooth.
Le logiciel SoMove est aussi compatible avec l’outil de configuration “Multi-Loader” et le logiciel SoMove Mobile pour téléphone portable.
Ces outils permettent de charger, de dupliquer ou d’éditer des configurations sur un appareil avec un gain de temps optimum.
Préparation des configurations en mode déconnecté
Le logiciel SoMove offre un réel mode déconnecté qui donne accès à tous les paramètres des appareils.
Ce mode peut être utilisé pour générer la configuration d’un appareil.
La configuration peut être sauvegardée, imprimée et exportée vers des logiciels de bureautique.
Le logiciel SoMove contrôle également la cohérence des paramètres validant ainsi les configurations créées en mode déconnecté.
Un grand nombre de fonctionnalités sont disponibles en mode déconnecté, notamment :
> L’assistant logiciel lors de la configuration des appareils.
> La comparaison de configurations.
> La sauvegarde, la copie, l’impression, la création de fichiers de configuration pour export vers les outils “Multi-loader”, SoMove Mobile ou Microsoft Excel et l’envoi par courrier électronique des configurations.
Exemple de connexion du logiciel SoMove à un variateur ATV
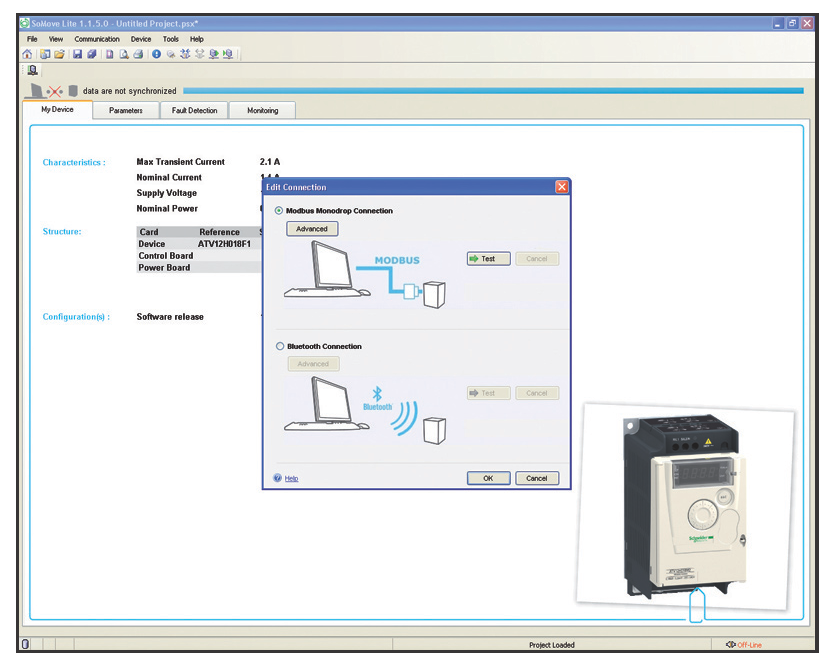
Mise en service
Le PC étant connecté à l’appareil, le logiciel SoMove peut être utilisé pour :
> Transférer la configuration générée sur l’appareil.
> Régler et surveiller.
Cette possibilité comporte des fonctionnalités telles que :
> L’oscilloscope.
> La visualisation des paramètres de communication.
> Envoyer des ordres de commande aisément grâce à l’ergonomie du panneau de commande.
> Sauvegarder la configuration finale.
Maintenance
Afin de faciliter les opérations de maintenance, le logiciel SoMove permet de :
> Comparer la configuration d’un appareil en service avec une configuration sauvegardée sur le PC.
> Transférer une configuration dans un appareil.
> Comparer les courbes d’oscilloscope.
> Enregistrer les courbes d’oscilloscope et les défauts.
Panneau de commande du logiciel SoMove
Ergonomie
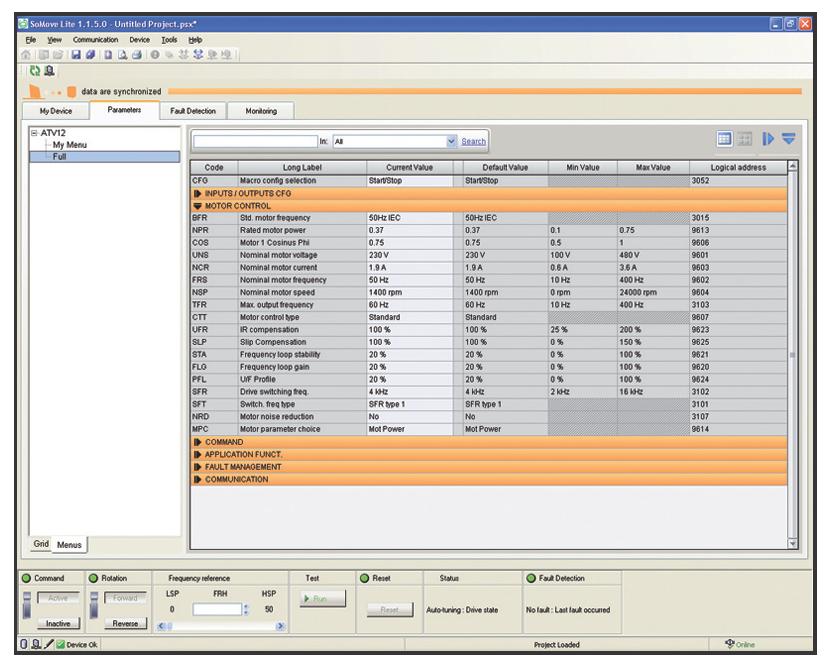
Le logiciel SoMove donne un accès rapide et direct à toutes les informations concernant l’appareil grâce à 5 onglets :
> “Mon appareil” : affiche toutes les informations de l’équipement (type, référence, versions du logiciel, cartes option, …).
> “Paramètres” : affiche tous les paramètres de réglages de l’équipement représentés dans un tableau ou sous forme de diagrammes.
> “Défauts” : affiche la liste des défauts susceptibles d’être rencontrés avec l’équipement, l’historique des défauts ainsi que les défauts ou alarmes courants.
> “Surveillance” : permet de visualiser en dynamique le statut de l’équipement, ses entrées/sorties ainsi que tous les paramètres de surveillance. Il est possible de construire son propre tableau de bord en sélectionnant ses paramètres et leur représentation.
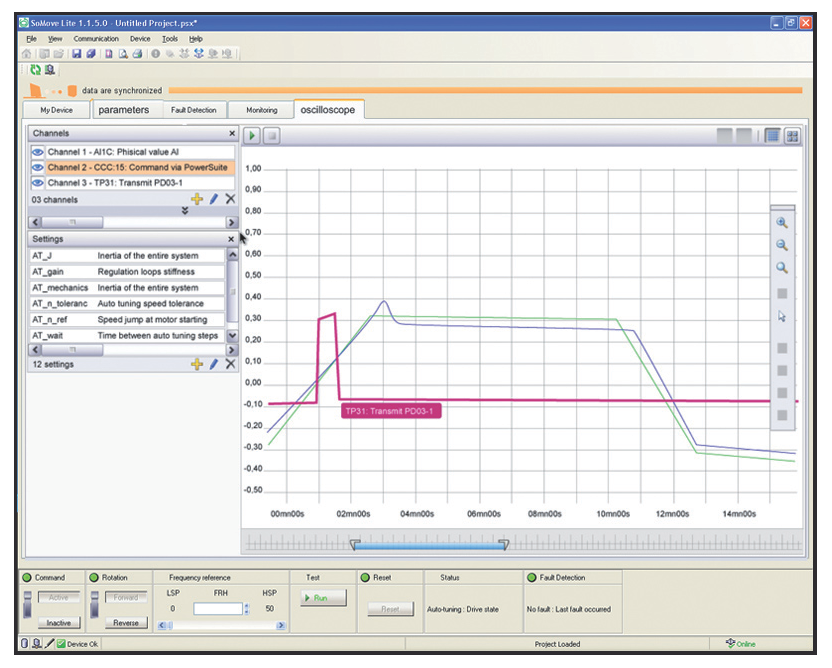
> “Oscilloscope” : propose un oscilloscope rapide (enregistrement des traces dans l’équipement) ou lent (enregistrement des traces dans le logiciel pour les équipements n’ayant pas d’oscilloscope intégré).
Fonction Oscilloscope du logiciel SoMove
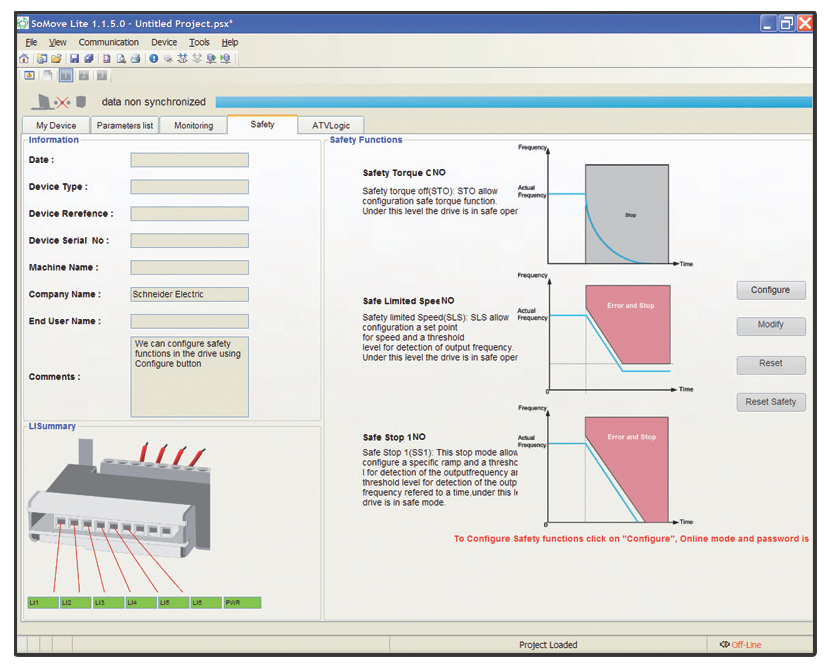
L’ergonomie du logiciel SoMove s’adapte automatiquement à l’appareil configuré en offrant des onglets complémentaires :
> “Safety” : permet de configuration les fonctions Safety des variateurs ATV 32 et des servo variateurs Lexium 32.
Permet également de :
Visualiser les entrées/sorties.
Rédiger et d’imprimer un rapport.
> “ATVLogic” : donne accès aux blocs fonction programmables du variateur ATV 32 .
Permet également de :
Concevoir le programme et de le transférer dans le variateur.
Visualiser et de mettre au point le programme présent dans le variateur.
> “Autoréglage” : donne accès aux réglages d’asservissement dans les 3 modes d’utilisation de la fonction autoréglage (autotuning) du servo variateur Lexium 32 :
Mode automatique pour un réglage rapide, dédié aux applications simples.
Mode semi-automatique pour un réglage rapide avec la possibilité d’optimiser l’association servo variateur/servomoteur (accès aux paramètres de la mécanique et au comportement dynamique).
Mode expert pour une optimisation des paramètres de réglages, dédié aux applications complexes.
Fonction Safety du logiciel SoMove
Option : résistances de freinage
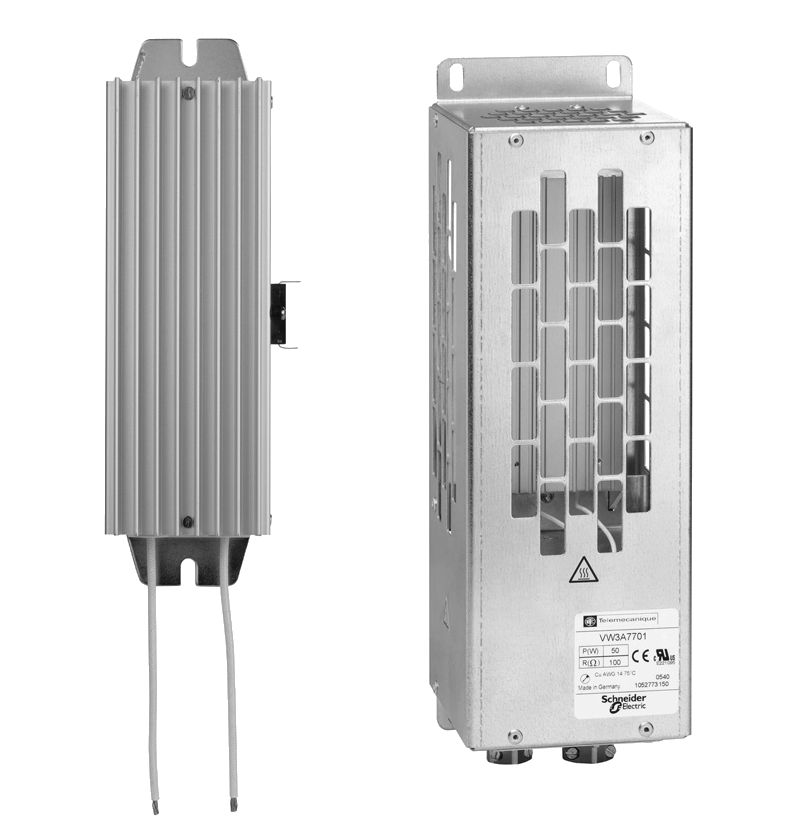
La résistance permet le fonctionnement du variateur Ativar 312 en freinage d’arrêt ou en marche freinée, en dissipant l’énergie de freinage.
Deux types de résistances sont disponibles :
> Modèle sous boîtier IP 20 conçu pour être conforme à la norme CEM et protégé par un thermo contact ou par un relais thermique.
Ce modèle permet un couple maximal de freinage transitoire.
Les résistances sont prévues pour être montées à l’extérieur de l’armoire ; la ventilation naturelle ne doit pas être gênée ; les entrées et les sorties d’air ne doivent pas être obstruées, même partiellement L’air doit être exempt de poussière, de gaz corrosif et de condensation.
> Modèle nu IP 00, sans protection, pour les petites puissances uniquement.
Applications
Machines à forte inertie, charges entraînantes, machines à cycles rapides.
Facteur de marche et détermination de la puissance nominale
La valeur de la puissance moyenne dissipable à 40 °C de la résistance dans le boîtier est déterminée pour un facteur de marche en freinage qui correspond à la plupart des applications courantes.
Pour une application spécifique (exemple : manutention), il est nécessaire de redéfinir la puissance nominale de la résistance en prenant en compte le nouveau facteur de marche.
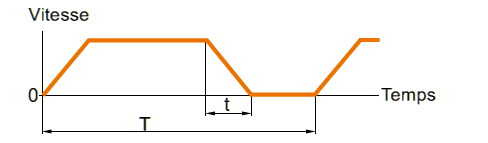
Facteur de marche : t / T.
t : temps de freinage en s.
T : temps de cycle en s.
Abaque n°1
Image de la puissance moyenne en fonction du couple de freinage pour un facteur de marche.

Exemple :
– Moteur de puissance Pm = 4 kW.
– Rendement moteur h = 0,85.
– Couple de freinage Cf = 0,6 Cn.
– Temps de freinage t = 10 s.
– Temps de cycle T = 50 s.
– Le facteur de marche fm = t / T = 20%.
Déduire de l’abaque n° 1 le coefficient K1 correspondant à un couple de freinage de 0,6 Cn et à un facteur de marche de 20 % : K1 = 0,06.
Abaque n°2
Surcharge admissible de la résistance en fonction du temps (courbe typique).
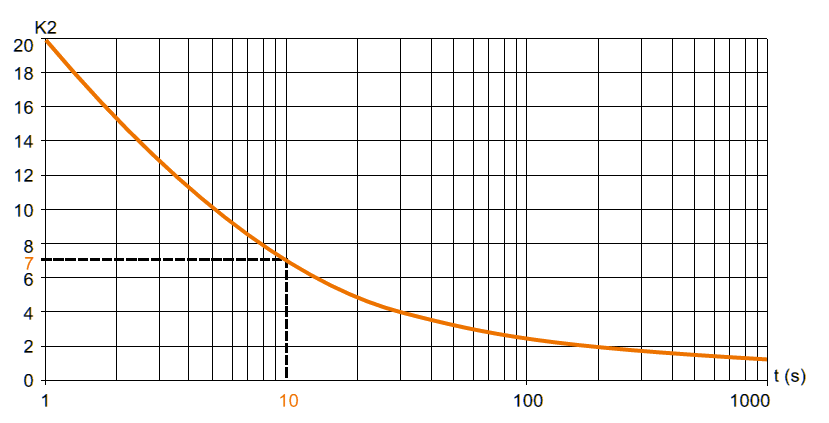
Déduire de l’abaque n° 2 le coefficient K2 correspondant au temps de freinage de 10 secondes.
K2 = 7
La puissance nominale de la résistance (Pn) doit être supérieure à :
![]()
Option : inductances de ligne
Les inductances de ligne permettent d’assurer une meilleure protection contre les surtensions du réseau et de réduire les harmoniques de courant produits par le variateur.
Les inductances recommandées permettent de limiter le courant de ligne.
Elles sont développées en correspondance avec la norme IEC 61800-5-1 (VDE 0160 niveau 1 surtensions de fortes énergies sur le réseau d’alimentation).
Les valeurs des inductances sont définies pour une chute de tension comprise entre 3 et 5 % de la tension nominale du réseau.
Une valeur plus importante entraîne une perte de couple.

L’utilisation d’inductances de ligne est particulièrement recommandée pour les variateurs ATV 312H…M2, ATV 312H…M3 et ATV 312H…N4, dans les cas suivants :
> Réseau fortement perturbé par d’autres récepteurs (parasites, surtensions).
> Réseau d’alimentation avec un déséquilibre de tension entre phases > 1,8 % de la tension nominale.
> Variateur alimenté par une ligne très peu impédante (à proximité de transformateur de puissance supérieure à 10 fois le calibre du variateur).
> Installation d’un grand nombre de convertisseurs de fréquence sur la même ligne.
> Réduction de la surcharge des condensateurs de relèvement du cos φ, si l’installation comporte une batterie de compensation d’énergie réactive.
L’utilisation d’inductances de ligne est obligatoire pour les variateurs ATV 312H…S6.
Le courant de court-circuit présumé au point de raccordement du variateur ne doit pas dépasser la valeur maximale indiquée dans les tableaux de références.
L’utilisation des inductances permet un raccordement sur des réseaux :
> Icc maxi 22 kA pour 200/240 V.
> Icc maxi 65 kA pour 380/500 V et 525/600V.
Filtres CEM intégrés et filtres CEM additionnels en option
Filtres intégrés
Le variateur Altivar 312, sauf ATV 312H…M3 et ATV312H…S6, intègre les filtres d’entrée atténuateurs de radio-perturbations pour répondre à la norme CEM de “produits” des entraînements électriques de puissance à vitesse variable IEC 61800-3 catégories C2 ou C3 et pour être conforme à la directive européenne sur la CEM (compatibilité électromagnétique).
Filtres CEM additionnels d’entrée
Les filtres CEM additionnels d’entrée (Non disponibles pour les variateurs ATV 312H…S6) permettent de répondre à des exigences plus sévères : ils sont destinés à réduire les émissions conduites sur le réseau en dessous des limites de la norme IEC 61800-3 catégorie C1 ou C2.
Ces filtres CEM additionnels peuvent être montés à côté ou sous le variateur Ils sont munis de trous taraudés pour la fixation des variateurs auxquels ils servent de supports.
Utilisation en fonction du type de réseau
L’utilisation des filtres CEM additionnels n’est possible que sur les réseaux de type TN (mise au neutre) et TT (neutre à la terre).
La norme IEC 61800-3, annexe D2 1 indique que, sur les réseaux de type IT (neutre impédant ou isolé), les filtres peuvent rendre aléatoire le fonctionnement des contrôleurs d’isolement.
L’efficacité des filtres additionnels sur ce type de réseau dépend de la nature de l’impédance entre neutre et masse, et est donc imprévisible.
Dans le cas d’une machine devant être installée sur réseau IT, une solution consiste à insérer un transformateur d’isolement et à mettre localement la machine en réseau TN ou TT.

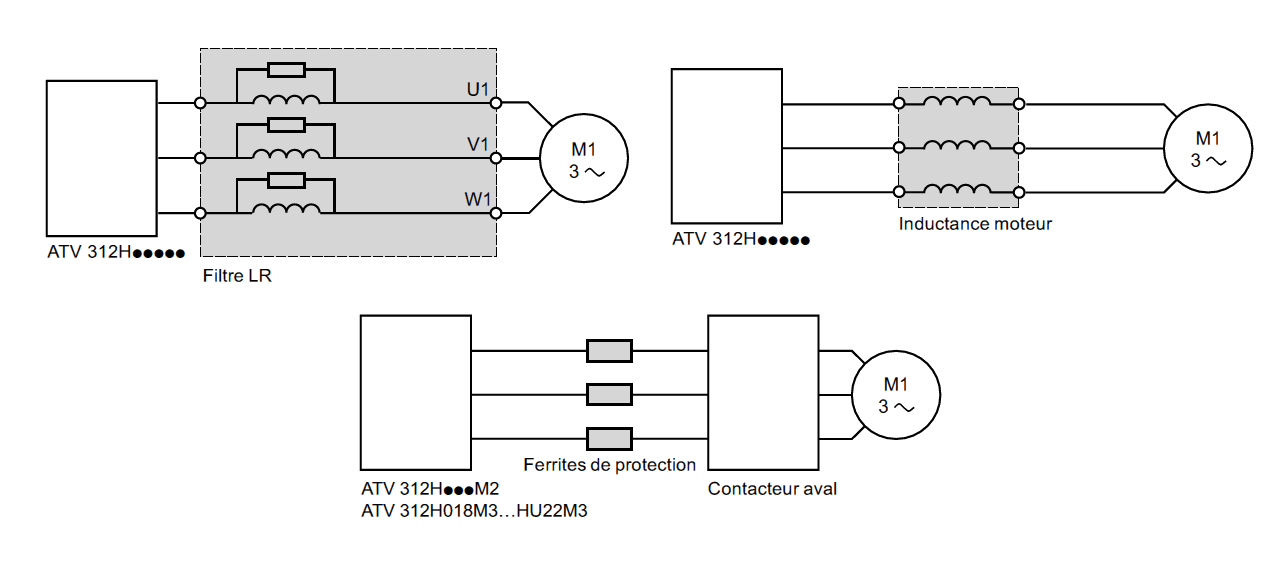
Options : filtres de sortie, inductances moteur et ferrites de protection
Les filtres de sortie et les inductances moteur peuvent être insérés entre le variateur Altivar 312 et le moteur pour :
> Limiter le dv/dt aux bornes du moteur (500 à 1500 V/µs), pour les câbles de longueur supérieure à 50 m.
> Filtrer les perturbations causées par l’ouverture d’un contacteur placé entre le filtre et le moteur.
> Diminuer le courant de fuite à la terre du moteur.
L’offre des filtres de sortie est constituée de cellules filtres LR.
Les ferrites de protection sont nécessaires pour les variateurs ATV 312H…M2 et ATV 312H018M3…HU22M3 lors de l’utilisation d’un contacteur pour coupure aval.
Cellule filtre LR
Cette cellule est formée de 3 inductances haute fréquence et de 3 résistances.
La cellule filtre LR est particulièrement adaptée pour :
> Diminuer le dv/dt aux bornes du moteur.
> Utiliser des câbles moteur de grandes longueurs.
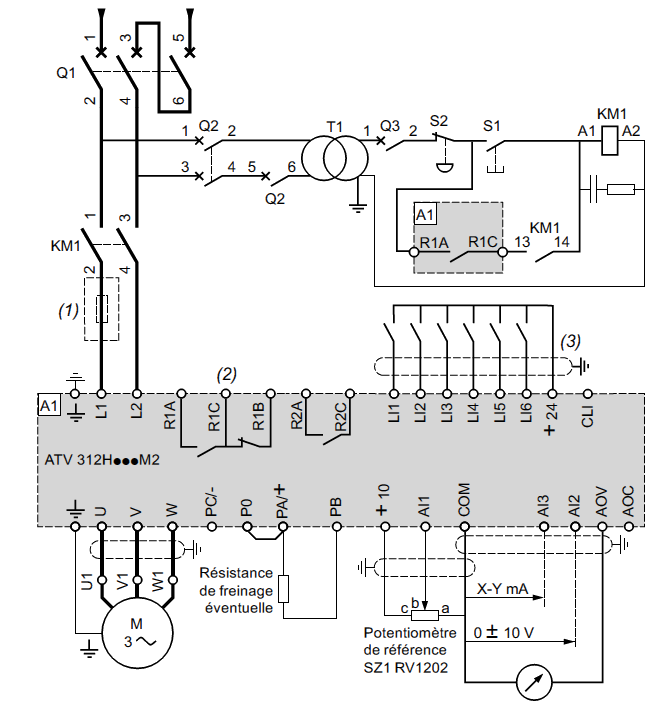
Schémas de raccordement
ATV 312H…M2 : Alimentation monophasée
(1) Inductance de ligne (1 phase ou 3 phases).
(2) Contacts du relais de défaut Permet de signaler à distance l’état du variateur.
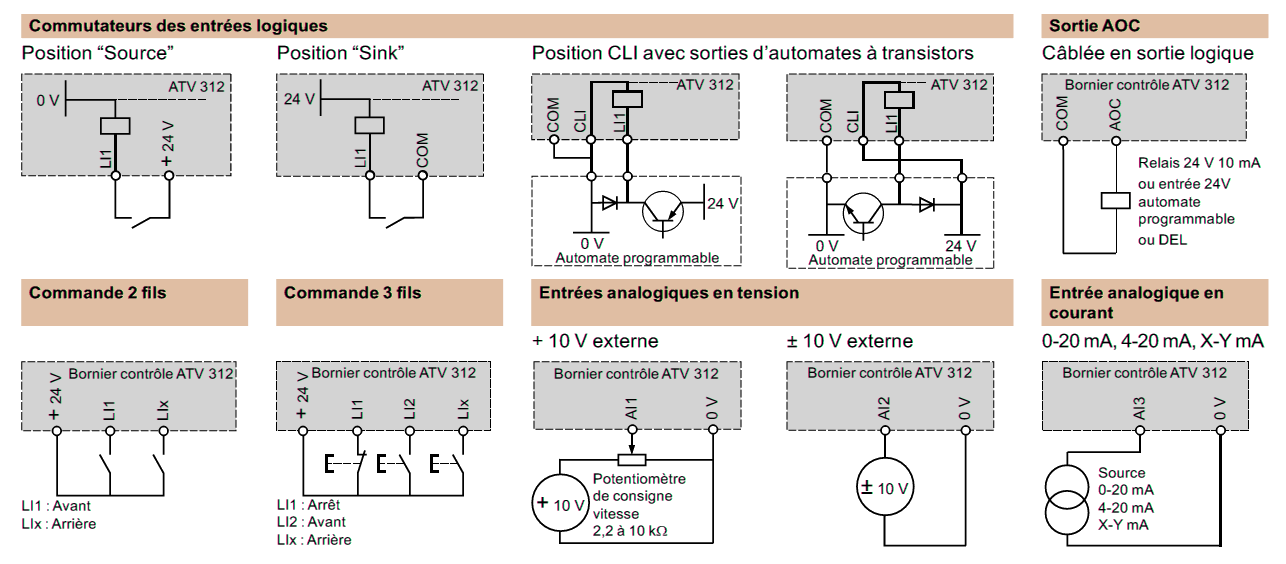
(3) Le raccordement du commun des entrées logiques dépend du positionnement du commutateur.
Nota : toutes les bornes sont situées en bas du variateur.
Equiper d’antiparasites tous les circuits selfiques proches du variateur ou couplés sur le même circuit, tels que relais, contacteurs, électrovannes, éclairage fluorescent, …
ATV 312H…M3, ATV 312H…N4, ATV 312H…S6 : Alimentation triphasée
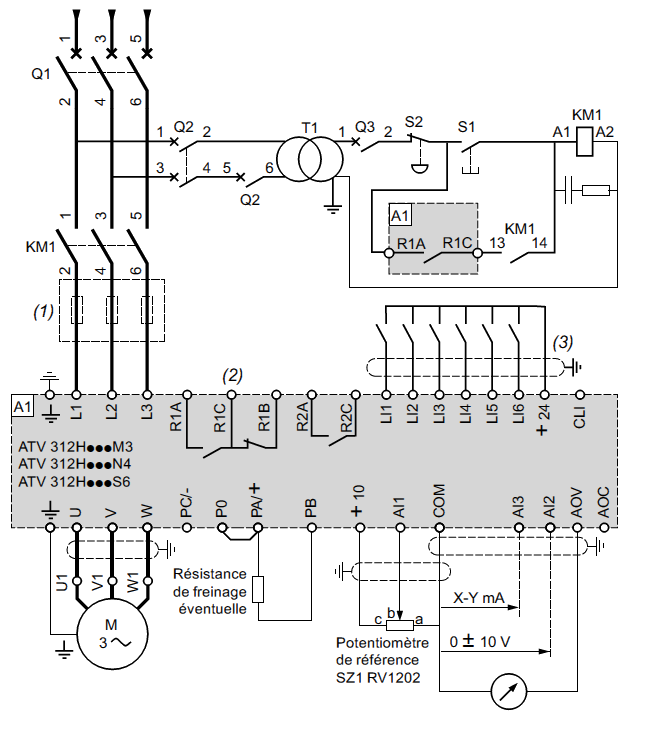
KM1 : Contacteur de ligne LC1 … + module d’antiparasitage LA4 DA2U.
Q1 : Disjoncteur magnétique GV2 L ou Compact NS.
Q2 : Disjoncteur magnétique GV2 L calibré à 2 fois le courant nominal primaire de T1.
Q3 : Disjoncteur magnéto-thermique GB2 CB05.
S1, S2 : Boutons poussoirs XB4 B ou XB5 A.
T1 : Transformateur 100 VA secondaire 230 V.
Exemples de schémas conseillés
Filtres CEM additionnels d’entrée VW3 A3140
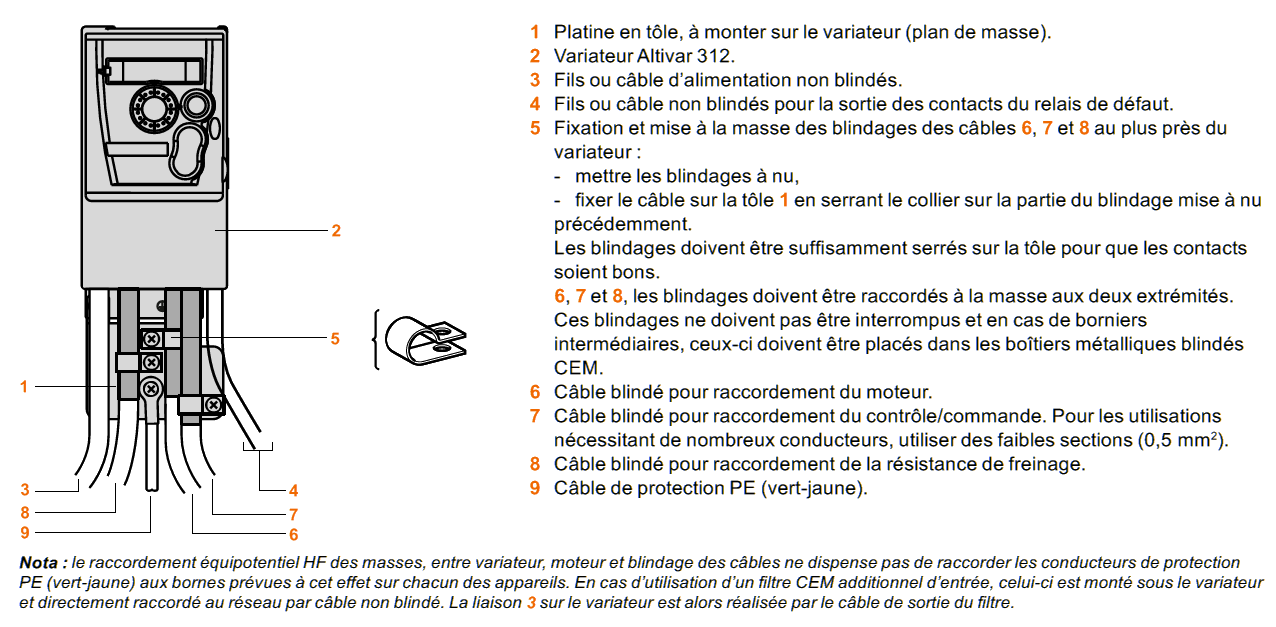
Raccordements permettant le respect des normes CEM
> Équipotentialité “haute fréquence” des masses entre le variateur, le moteur et les blindages des câbles.
Utilisation de câbles blindés avec blindages reliés à la masse sur 360° aux deux extrémités pour le câble moteur, le câble de la résistance de freinage et les câbles contrôle/commande.
Ce blindage peut être réalisé sur une partie du parcours par tubes ou goulottes métalliques à condition qu’il n’y ait pas de discontinuité dans le raccordement de masse.
> Séparer le plus possible le câble d’alimentation réseau du câble moteur.
Fonctions d’application
Gamme de vitesse de fonctionnement
Permet la détermination des 2 limites de fréquence définissant la gamme de vitesse autorisée par la machine dans les conditions réelles d’exploitation, pour toutes les applications avec ou sans survitesse.
Temps des rampes d’accélération et de décélération
Permet la détermination des temps des rampes d’accélération et de décélération en fonction de l’application et de la cinématique de la machine.
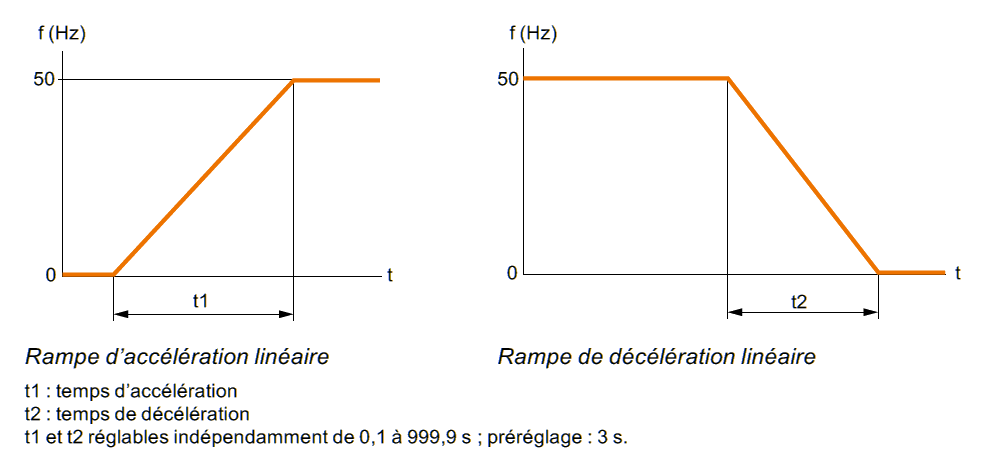
Forme des rampes d’accélération et de décélération
Permet l’évolution progressive de la fréquence de sortie à partir d’une consigne de vitesse, suivant une loi linéaire ou une loi préétablie.
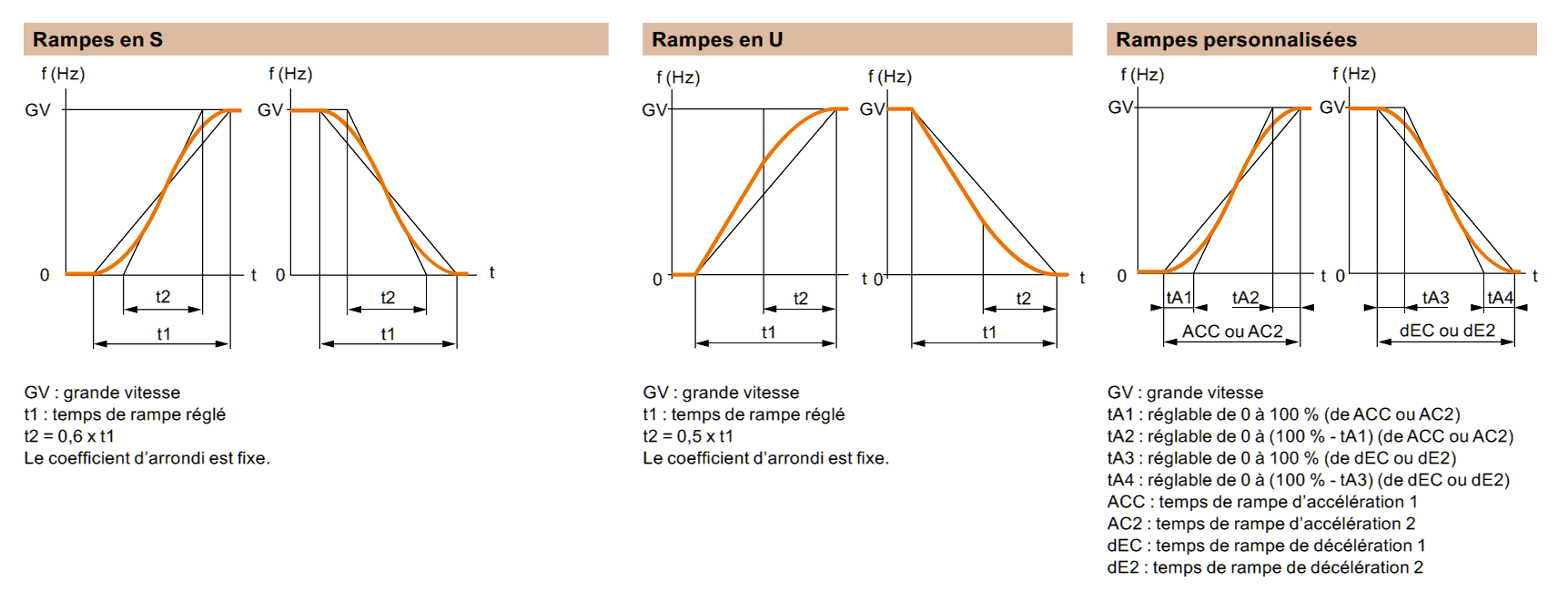
> Rampes en S
L’utilisation des rampes en S est dédiée aux applications de manutention, de conditionnement et de transport de personnes ; elle permet de rattraper les jeux mécaniques et de supprimer les à-coups, et limite les “non-suivis” de vitesse lors de régimes transitoires rapides en cas de forte inertie.
> Rampes en U
L’utilisation des rampes en U est dédiée aux applications de pompage telles qu’une installation avec pompe centrifuge et clapet anti-retour ; elle permet d’améliorer la maîtrise de la fermeture du clapet anti-retour.
Le choix “linéaire”, “en S”, “en U” ou personnalisé affecte à la fois la rampe d’accélération et la rampe de décélération.
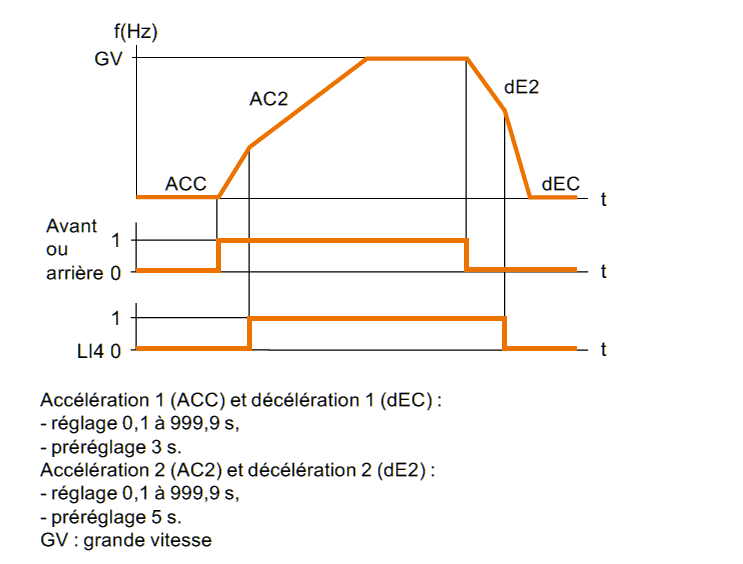
Commutation de rampe
Permet la commutation de 2 temps de rampe en accélération et en décélération, réglables séparément.
La commutation de rampe peut être validée par :
> Une entrée logique.
> Un seuil de fréquence.
> La combinaison de l’entrée logique et du seuil de fréquence.
Fonction dédiée :
– A la manutention avec démarrage et accostage en douceur.
– Aux machines avec correction de vitesse rapide en régime établi.
Exemple de commutation par l’entrée logique LI4
Adaptation automatique de la rampe de décélération
Permet l’adaptation automatique de la rampe de décélération si le réglage initial est trop faible compte tenu de l’inertie de la charge.
Cette fonction évite le verrouillage éventuel du variateur sur défaut freinage excessif.
Fonction dédiée à toutes les applications ne nécessitant pas d’arrêt précis et n’utilisant pas de résistance de freinage.
L’adaptation automatique doit être supprimée dans le cas de machine avec positionnement d’arrêt sur rampe et avec résistance de freinage. Cette fonction est automatiquement inhibée si la logique de frein est configurée.
Loi tension/fréquence
Caractéristiques de l’alimentation et du moteur.
Permet la détermination des valeurs limites de la loi tension/fréquence, en fonction des caractéristiques du réseau d’alimentation, du moteur et de l’application.
Pour les applications à couple constant ou à couple variable avec ou sans survitesse, les valeurs suivantes sont à régler :
> La fréquence de base correspondant au réseau.
> La fréquence nominale du moteur (en Hz), lue sur la plaque signalétique moteur.
> La tension nominale du moteur (en V), lue sur la plaque signalétique moteur.
> La fréquence maximale de sortie du variateur (en Hz).
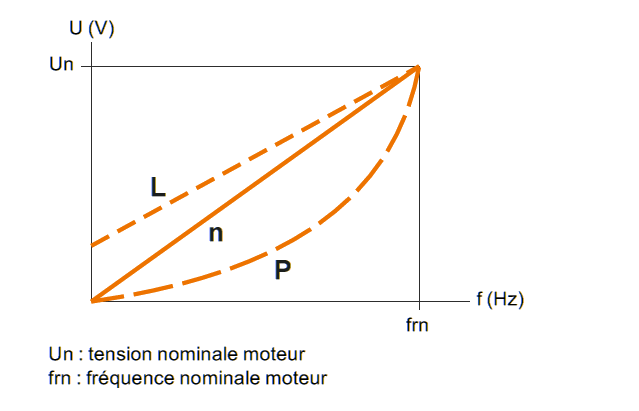
Type de loi tension/fréquence
Permet l’adaptation de la loi tension/fréquence à l’application de façon à optimiser les performances, pour les applications suivantes :
> Applications à couple constant (machines moyennement chargées à basse vitesse) avec moteurs en parallèle ou moteurs spéciaux (ex : à cage résistante) : loi L.
> Applications à couple variable (pompes, ventilateurs) : loi P.
> Machines fortement chargées à basse vitesse, machines à cycles rapides, avec contrôle vectoriel de flux (sans capteur) : loi n.
> Economie d’énergie, pour machine à variations lentes de couple et de vitesse : loi nLd.
La tension est automatiquement réduite au minimum en fonction du couple nécessaire.
Autoréglage
L’autoréglage peut s’effectuer :
> Au moyen des outils de dialogue via la commande locale ou la liaison série, sur action volontaire.
> A chaque mise sous tension.
> A chaque ordre de marche.
> Par validation d’une entrée logique.
L’autoréglage permet d’optimiser les performances de l’application.
Fréquence de découpage, réduction de bruit
Le réglage de la fréquence de découpage permet de réduire le bruit généré par le moteur.
La fréquence de découpage est modulée de façon aléatoire pour éviter les phénomènes de résonance.
Cette fonction peut être inhibée si elle entraîne une instabilité.
Le découpage, à haute fréquence de la tension continue intermédiaire, permet de fournir au moteur une onde de courant avec peu d’harmoniques. La fréquence de découpage est réglable, en fonctionnement, pour réduire le bruit généré par le moteur.
Valeur : 2 à 16 kHz, préréglage usine 4 kHz.
Pour toutes les applications nécessitant un faible niveau acoustique du moteur.
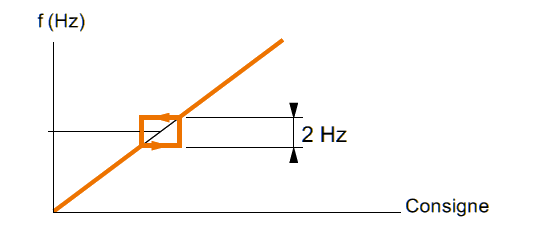
Fréquences occultées
Permettent la suppression d’une ou deux vitesses critiques entraînant des phénomènes de résonance mécanique.
Il est possible d’interdire le fonctionnement prolongé du moteur sur 1 ou 2 bandes de fréquences de ± 1 Hz, autour d’une fréquence réglable sur la gamme de vitesse.
Fonction dédiée aux machines à structure légère, convoyeurs de produits en vrac avec moteur à balourd, ventilateurs et pompes centrifuges.
Evolution de la vitesse moteur en fonction de la consigne avec une fréquence occultée
Consigne de vitesse
La consigne de vitesse peut avoir différentes sources en fonction de la configuration du variateur :
> Les consignes issues des 3 entrées analogiques.
> La consigne du bouton de navigation.
> La fonction plus vite/moins vite par entrée logique, avec les touches du clavier ou du terminal déporté.
> La consigne du terminal déporté.
> Les consignes de vitesse issues des réseaux ou bus de communication.
Ces différentes sources sont gérées par programmation des fonctions et des canaux de consignes.
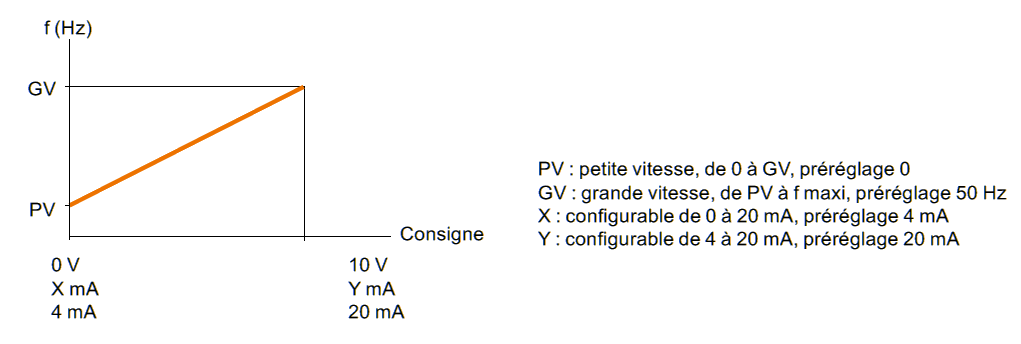
Entrées analogiques
Il existe 3 entrées analogiques.
2 entrées en tension :
> 0-10 V (AI1).
> ± 10 V (AI2).
1 entrée en courant :
> X-Y mA (AI3) avec X configurable entre 0 et 20 mA, et Y configurable entre 4 et 20 mA.
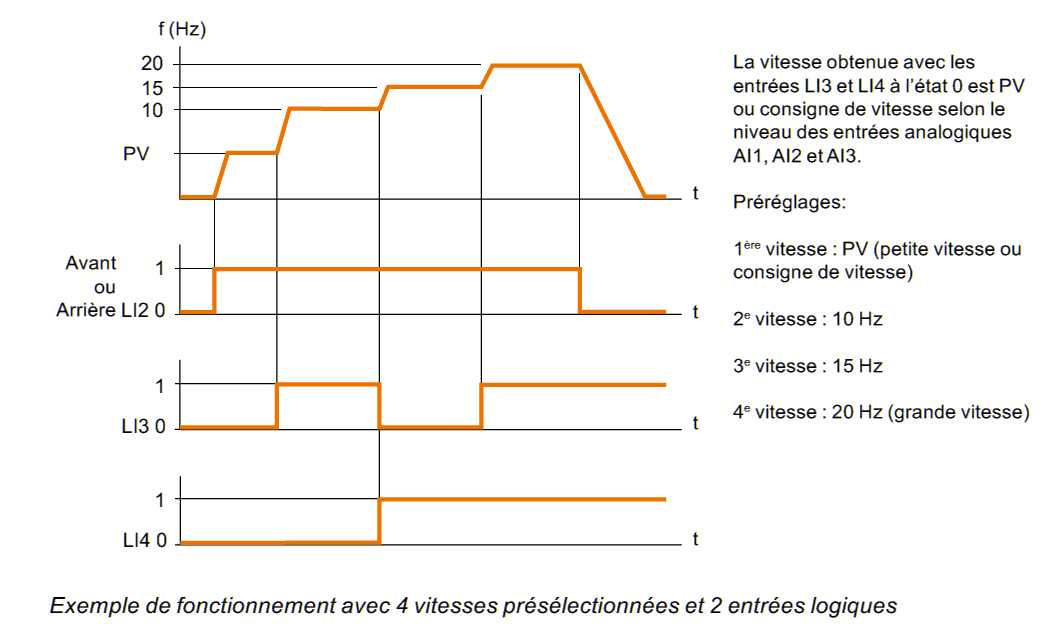
Vitesses présélectionnées
Permet la commutation de consignes de vitesse préréglées.
Choix entre 2, 4, 8 ou 16 vitesses présélectionnées.
Validation par 1, 2, 3 ou 4 entrées logiques.
Les vitesses présélectionnées sont réglables par pas de 0,1 Hz de 0 Hz à 500 Hz.
Fonction dédiée à la manutention et aux machines à plusieurs vitesses de fonctionnement.
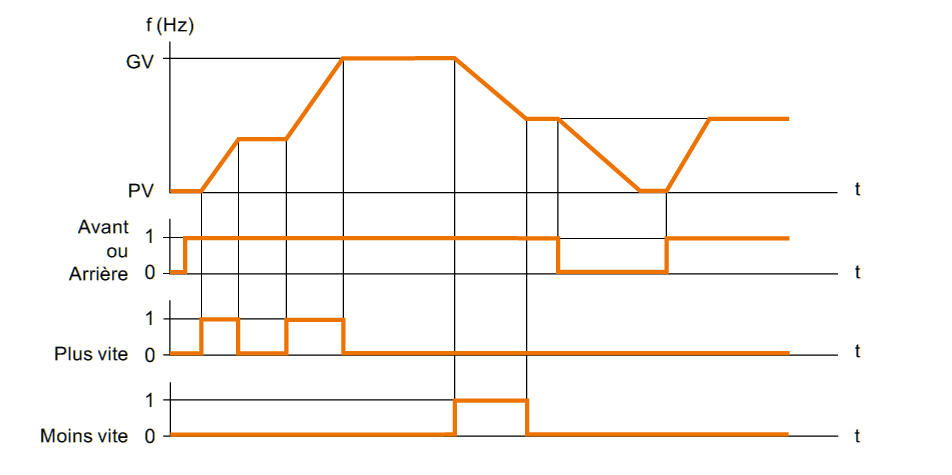
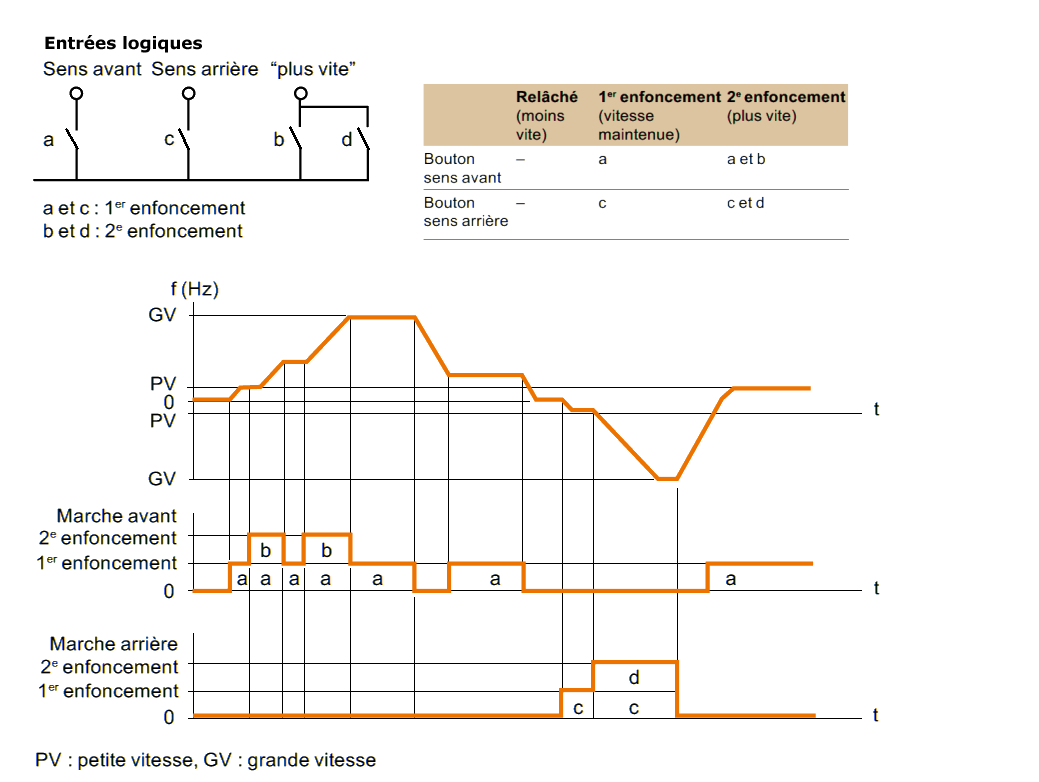
Plus vite/moins vite
Permet l’augmentation ou la diminution d’une consigne de vitesse à partir d’une ou de deux entrées logiques avec ou sans mémorisation de la dernière consigne (fonction de potentiomètre motorisé).
Fonction dédiée à la commande centralisée d’une machine à plusieurs sections à 1 seul sens de marche ou à la commande par boîte pendante d’un portique de manutention, à 2 sens de marche.
Deux types de fonctionnement sont disponibles :
> Utilisation de boutons simple action : deux entrées logiques sont nécessaires en plus du ou des sens de marche.
L’entrée affectée à la commande “plus vite” augmente la vitesse, l’entrée affectée à la commande “moins vite” diminue la vitesse.
Exemple de “plus vite/moins vite” avec 2 entrées logiques, boutons simple action et avec mémorisation de consigne
> Utilisation de boutons double action, seule une entrée logique affectée à “plus vite” est nécessaire.
Exemple avec boutons à double action et une entrée logique.
Nota : ce type de commande “Plus vite/moins vite” est incompatible avec la commande 3 fils.
Mémorisation de consigne
Fonction associée à la commande “Plus vite/moins vite”.
Permet la prise en compte et la mémorisation du niveau de consigne de vitesse à la disparition de l’ordre de marche ou du réseau. La mémorisation est appliquée à l’ordre de marche suivant.
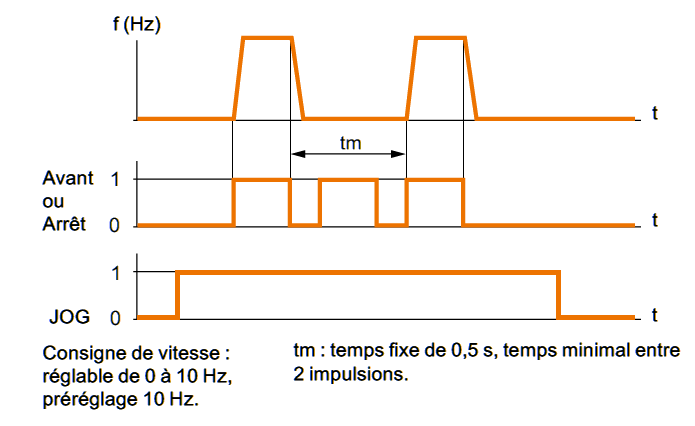
Marche pas à pas (JOG)
Permet la marche impulsionnelle avec des temps de rampes minimum (0,1 s), une consigne de vitesse limitée et un temps minimal entre 2 impulsions.
Validation par 1 entrée logique et impulsions données par la commande du sens de marche.
Fonction dédiée aux machines avec engagement de produit en marche manuelle (exemple : avance progressive de la mécanique lors d’une opération de maintenance).
Canaux de commande et de consigne
Il existe plusieurs canaux de commande et de consigne qui peuvent être indépendants.
Les ordres de commande (marche avant, marche arrière, …) et les consignes de vitesse peuvent être données par les canaux suivants :
> Bornier (entrées logiques et entrées/sorties analogiques).
> Mode local (touches “STOP/RESET”, “RUN” et bouton de navigation).
> Terminal déporté.
> Liaison série : terminal déporté, mot de commande Modbus, mot de commande CANopen.
Les canaux de commande et les canaux de consigne de vitesse peuvent être séparés.
Exemple : consigne vitesse donnée par CANopen et ordre de commande donné par le terminal déporté.
Nota : les touches “STOP/RESET” de l’interface Homme-Machine du clavier et du terminal déporté peuvent conserver leur priorité.
Les fonctions “Entrées sommatrices” et “Régulateur PI” s’appliquent uniquement à un canal de consigne.
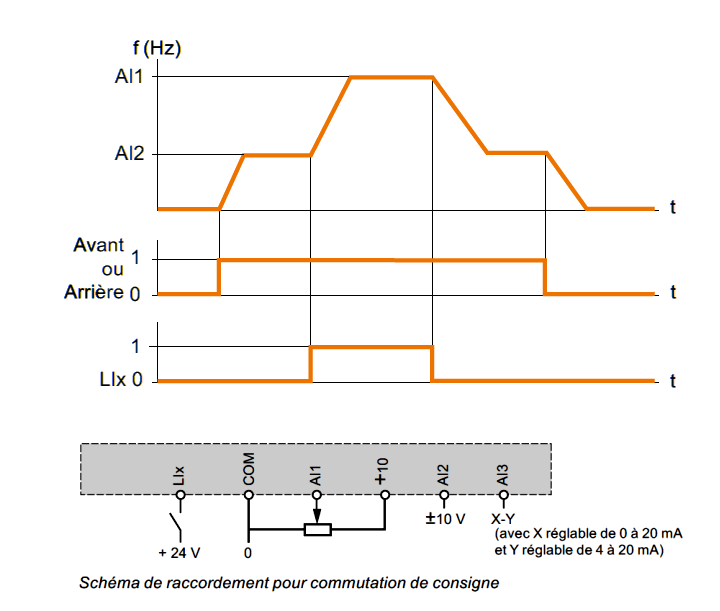
Commutation de consigne
La commutation entre 2 consignes de vitesse peut être validée par :
> Une entrée logique.
> Un bit dans un mot de commande Modbus ou CANopen.
La consigne 1 est active si l’entrée logique (ou le bit du mot de commande) est au niveau 0, la consigne 2 est active si l’entrée logique (ou le bit du mot de commande) est au niveau 1.
La commutation de consigne peut s’effectuer moteur en marche.
Entrées sommatrices
Permet d’additionner 2 à 3 consignes de vitesse de sources différentes.
Les consignes à additionner sont à choisir parmi tous les types de consigne de vitesse possibles.
Exemple :
> Consigne 1 issue de AI1.
> Consigne 2 issue de AI2.
>Consigne 3 issue de AIP.
Consigne de vitesse du variateur = consigne 1 + consigne 2 + consigne 3.
Régulateur PI
Permet la régulation simple d’un débit ou d’une pression avec capteur délivrant un signal de retour adapté au variateur.
Fonction dédiée aux applications de pompage et de ventilation.
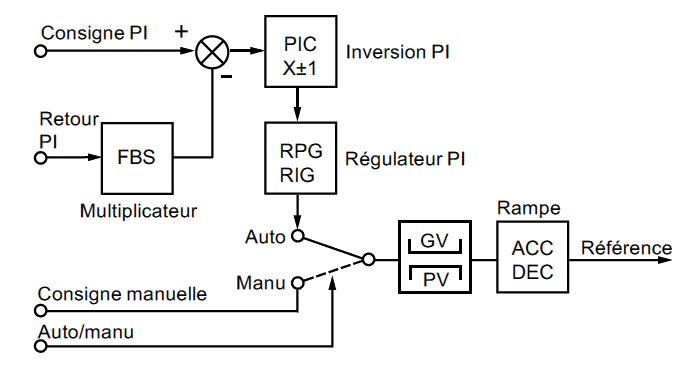
ACC : Accélération.
DEC : Décélération.
FBS : Coefficient multiplicateur du retour PI.
GV : Grande vitesse.
PIC : Inversion du sens de correction du régulateur PI.
PV : Petite vitesse.
RIG : Gain intégral du régulateur PI.
RPG : Gain proportionnel du régulateur PI.
Consigne PI :
– Consigne interne du régulateur réglable de 0 à 100.
– Consigne de régulation choisie parmi tous les types de consigne de régulation possibles.
– Consignes PI présélectionnées.
2 ou 4 consignes PI présélectionnées réglables de 0 à 100, nécessitent respectivement l’utilisation de 1 ou 2 entrées logiques.
Consigne manuelle
Consigne de vitesse choisie parmi tous les types de consigne de vitesse possibles.
Retour PI :
– Entrée analogique AI1, AI2 ou AI3.
Auto/Manu :
Entrée logique LI, pour commutation de la marche en consigne de vitesse (Manu) ou régulation PI (Auto).
Lors du fonctionnement en automatique, il est possible d’adapter le retour process, de faire une correction de PI inverse, de régler les gains proportionnel et intégral, d’appliquer une rampe (temps = ACC – DEC) d’établissement de l’action du PI au démarrage et à l’arrêt.
La vitesse moteur est limitée entre PV et GV.
Nota : la fonction PI est incompatible avec les fonctions “Vitesses présélectionnées” et “Marche pas à pas” (JOG).
La consigne PI peut être également transmise en ligne via la liaison série RS 485 Modbus ou via le bus CANopen.
Commutation de limitation de courant
Une 2e limitation de courant est configurable entre 0,25 et 1,5 fois le courant nominal variateur.
Permet de limiter le couple et l’échauffement du moteur.
La commutation entre les 2 limitations de courant peut être validée par :
> Une entrée logique.
> Un bit dans un mot de commande Modbus ou CANopen.
Limitation du temps de marche à petite vitesse
L’arrêt du moteur est provoqué automatiquement après un temps de fonctionnement à petite vitesse (PV) avec consigne nulle et ordre de marche présent.
Ce temps est réglable de 0,1 à 999,9 secondes (0 correspond à un temps non limité).
Préréglage : 0 s. Le redémarrage s’effectue automatiquement sur rampe lorsque la consigne réapparaît ou sur coupure et rétablissement de l’ordre de marche.
Fonction dédiée aux Arrêts/Marches automatiques de pompes régulées en pression.
Commutation de moteur
Permet d’alimenter successivement par le même variateur deux moteurs de puissances différentes.
La commutation doit être faite à l’arrêt, variateur verrouillé, par une séquence appropriée en sortie du variateur.
La fonction permet d’adapter les paramètres moteurs. Les paramètres suivants sont automatiquement commutés :
> Tension nominale moteur.
> Fréquence nominale moteur.
> Courant nominal moteur.
> Vitesse nominale moteur.
> Cosinus phi moteur.
> Choix du type de loi tension/fréquence moteur 2.
> Compensation RI moteur 2.
> Gain de la boucle fréquence moteur.
> Stabilité moteur.
> Compensation de glissement moteur.
La protection thermique moteur est inhibée par cette fonction.
La commutation de moteur peut être validée par :
> Une entrée logique.
> Un bit dans un mot de commande Modbus ou CANopen.
En application levage, cette fonction permet l’utilisation d’un seul variateur pour un mouvement vertical et un mouvement horizontal.
Commutation de commande
La commutation du canal de commande permet de choisir entre 2 modes decommande.
La commutation peut être validée par :
> Une entrée logique.
> Un bit dans un mot de commande Modbus ou CANopen.
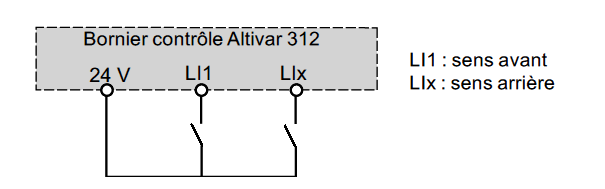
Commande 2 fils
Permet la commande du sens de marche par contact à position maintenue.
Validation par 1 ou 2 entrées logiques (1 ou 2 sens de marche).
Fonction dédiée à toutes les applications à 1 ou 2 sens de marche.
3 modes de fonctionnement sont possibles :
> Détection de l’état des entrées logiques.
> Détection d’un changement d’état des entrées logiques.
> Détection de l’état des entrées logiques avec sens avant prioritaire sur le sens arrière.
Schéma de câblage en commande 2 fils
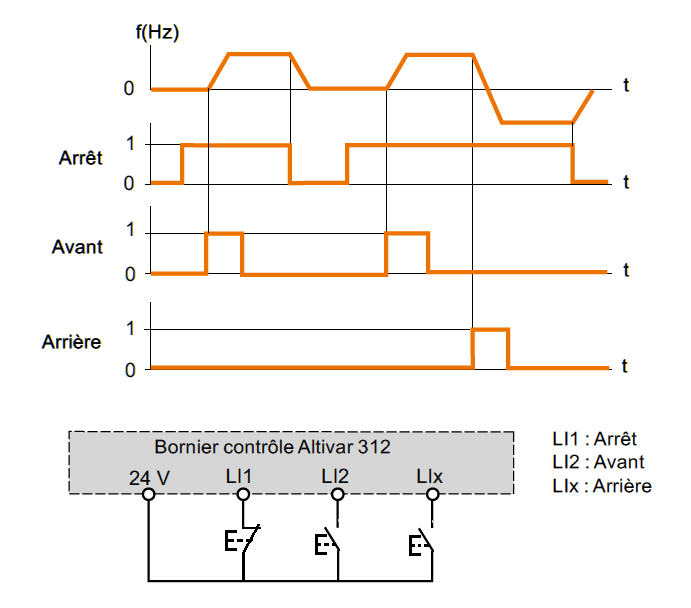
Commande 3 fils
Permet la commande du sens de marche et de l’arrêt par contacts à impulsions.
Validation par 2 ou 3 entrées logiques (1 ou 2 sens de marche).
Fonction dédiée à toutes les applications à 1 ou 2 sens de marche.
Forçage mode local
Le forçage du mode local impose la validation de la commande par le bornier ou le terminal et inhibe les autres modes de commande.
Les consignes et les commandes disponibles pour le forçage local sont les suivantes :
> Consignes AI1, ou AI2, ou AI3 et commande par entrées logiques.
> Consigne et commande par touches “RUN”, “STOP/RESET” et le bouton de navigation.
> Consigne et commande par terminal déporté.
Le passage en mode forçage local est validé par une entrée logique.
Arrêt roue libre
Permet l’arrêt du moteur par le couple résistant si l’alimentation du moteur est coupée.
L’arrêt roue libre est obtenu :
> Par un ordre d’arrêt normal configuré en arrêt roue libre (à la disparition d’un ordre de marche ou à l’apparition d’un ordre d’arrêt).
> Par validation d’une entrée logique.
Arrêt rapide
Permet l’arrêt freiné avec un temps de rampe de décélération (divisé par 2 à 10) acceptable par l’ensemble variateur/moteur sans verrouillage sur défaut freinage excessif.
Utilisation pour les convoyeurs avec freinage électrique d’arrêt d’urgence.
L’arrêt rapide est obtenu :
> Par arrêt normal configuré en arrêt rapide (à la disparition d’un ordre de marche ou à l’apparition d’un ordre d’arrêt).
> Par validation d’une entrée logique.
Arrêt par injection de courant continu
Permet de freiner à basse vitesse les ventilateurs à forte inertie ou de maintenir un couple à l’arrêt dans le cas de entilateurs situés dans un flux d’air.
L’arrêt par injection à courant continu est obtenu :
> Par arrêt normal configuré en arrêt par injection de courant continu (à la disparition d’un ordre de marche ou à l’apparition d’un ordre d’arrêt).
> Par validation d’une entrée logique.
Le courant continu et le temps de freinage à l’arrêt sont réglables.
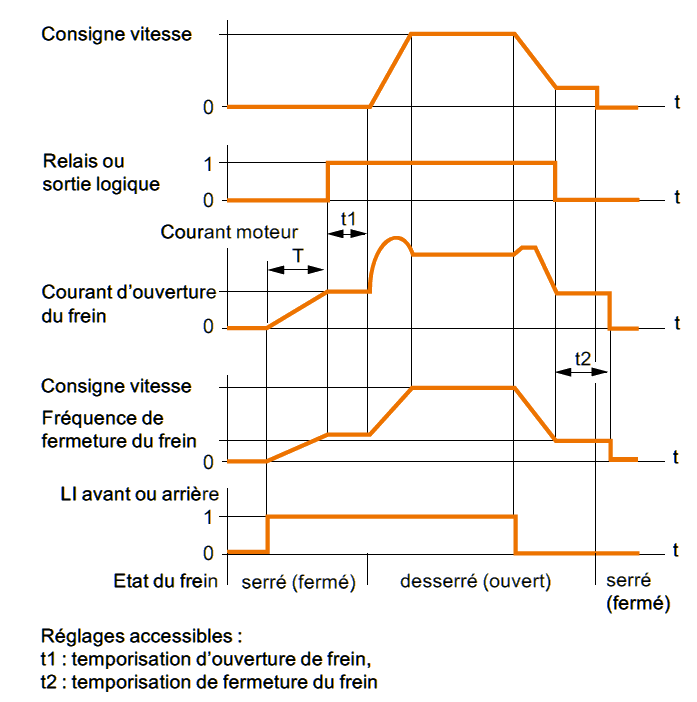
Commande de frein
Permet la gestion de la commande d’un frein électro-magnétique en synchronisation avec le démarrage et l’arrêt du moteur pour éviter les à-coups ou les dévirages.
La logique de commande de frein est gérée par le variateur.
Valeurs réglables pour l’ouverture : seuil de courant et temporisation.
Valeurs réglables pour la fermeture : seuil de fréquence et temporisation.
Validation : sortie logique à relais R2 ou sortie logique AOC affectées à la commande du frein.
Fonction dédiée aux applications de manutention avec mouvements équipés de freins électro-magnétiques (levage) et aux machines nécessitant un contrôle de frein de parking (machine à balourd).
Principe :
– Mouvement de levage vertical :
Maintenir un couple moteur dans le sens montée pendant les phases d’ouverture et de fermeture du frein, de façon à retenir la charge, et à démarrer sans à-coup au moment du desserrage du frein.
– Mouvement de levage horizontal :
Synchroniser l’ouverture du frein avec l’établissement du couple au démarrage et la fermeture du frein à vitesse nulle à l’arrêt, pour supprimer les à-coups.
Recommandations de réglages de la commande de frein, pour une application levage vertical (pour une application levage horizontal, régler le seuil de courant à zéro).
– Courant d’ouverture du frein : ajuster le courant de levée de frein au courant nominal plaqué sur le moteur. Si lors des essais, le couple est insuffisant, augmenter le courant de levée de frein (la valeur maximale est imposée par le variateur).
– Temps d’accélération : pour les applications levage, il est conseillé de régler des rampes d’accélération supérieures à 0,5 s. S’assurer que le variateur ne passe pas en limitation de courant.
Même recommandation pour la décélération.
Rappel : pour un mouvement de levage, une résistance de freinage devra être utilisée et il faudra s’assurer que les réglages et configurations choisies ne peuvent entraîner une chute ou un non contrôle de la charge soulevée.
– Temporisation d’ouverture du frein t1 : ajuster en fonction du type de frein, c’est le temps nécessaire au frein mécanique pour s’ouvrir.
Fréquence de fermeture du frein : régler à 2 fois le glissement nominal, puis ajuster en fonction du résultat.
– Temporisation de fermeture du frein t2 : ajuster en fonction du type de frein, c’est le temps nécessaire au frein mécanique pour se fermer.
Gestion de fin de course
Permet de gérer l’action d’un ou de deux interrupteurs de fin de courses (1 ou 2 sens de marche).
Chaque limitation (avant, arrière) est associée à une entrée logique.
Le type d’arrêt à la détection d’une limite est configurable en arrêt normal, arrêt roue libre ou arrêt rapide.
Après arrêt, seul le redémarrage dans l’autre sens est autorisé.
Surveillance
Les informations suivantes peuvent être affichées :
> Consigne fréquence.
> Consigne interne PI.
> Consigne de fréquence (en valeur absolue).
> Fréquence de sortie appliquée au moteur (valeur signée en complément à 2).
> Fréquence de sortie en unité client.
> Courant dans le moteur.
> Puissance moteur : 100 % = puissance nominale.
> Tension réseau.
> Etat thermique moteur : 100 % état thermique nominal, 118 % seuil de surcharge moteur.
> Etat thermique variateur : 100 % état thermique nominal, 118 % seuil de surchauffe variateur.
> Couple moteur : 100 % = couple nominal.
> Dernier défaut apparu.
> Temps de fonctionnement.
> Etat de l’autoréglage.
> Configuration et état des entrées logiques.
> Configuration des entrées analogiques.
Gestion des défauts
Il existe différents modes de fonctionnement sur les défauts réarmables :
> Arrêt roue libre.
> Le variateur passe à la vitesse de repli.
> Le variateur conserve la vitesse qu’il avait au moment du défaut, jusqu’à disparition du défaut.
> Arrêt sur rampe.
> Arrêt rapide.
Les défauts réarmables détectés sont les suivants :
> Surchauffe variateur.
> Surchauffe moteur.
> Défaut bus CANopen.
> Coupure liaison série Modbus.
> Défauts externes.
> Perte de signal 4-20 mA.
Remise à zéro des défauts
Permet l’effacement du dernier défaut par une entrée logique.
Les conditions de démarrage après remise à zéro sont celles d’une mise sous tension normale.
Remise à zéro des défauts : surtension, survitesse, défaut externe, surchauffe du variateur, perte phase moteur, surtension bus continu, perte consigne 4-20 mA, dévirage de la charge, surcharge moteur si l’état thermique est inférieur à 100 %, défaut liaison série.
Les défauts “sous tension réseau” et “perte phase réseau” se réarment automatiquement lorsque le réseau redevient normal.
Fonction dédiée aux applications dont les variateurs sont difficilement accessibles, par exemple placés sur une partie mobile, en manutention.
Inhibition de tous les défauts
Cette fonction permet l’inhibition de tous les défauts, y compris des protections thermiques (marche forcée) et peut entraîner la destruction du variateur.
Dans ce cas, la garantie n’est plus assurée.
Fonction dédiée aux applications dont le redémarrage peut être vital (convoyeur dans un four, station de désenfumage, machine avec produits solidifiant à évacuer).
La fonction est validée par une entrée logique.
La surveillance des défauts est active si l’entrée logique est à l’état 1.
Au changement d’état de l’entrée logique (sur front), tous les défauts sont réarmés.
Arrêt contrôlé sur coupure réseau
Permet le contrôle de l’arrêt du moteur lors d’une coupure du réseau.
Fonction dédiée à la manutention, aux machines à forte inertie, aux machines de traitement de produit en continu.
Types d’arrêt possibles :
> Verrouillage du variateur et arrêt roue libre.
> Arrêt qui utilise l’inertie mécanique pour conserver l’alimentation du variateur le plus longtemps possible.
> Arrêt suivant la rampe.
> Arrêt rapide (dépend de l’inertie et des possibilités de freinage du variateur).
Mode d’arrêt sur défaut
A la détection d’un défaut, le mode d’arrêt est configurable en arrêt normal, arrêt roue libre ou arrêt rapide pour les défauts suivants :
> Défaut externe (détection validée par une entrée logique ou un bit dans un mot de commande Modbus ou CANopen).
> Défaut coupure phase moteur.
L’utilisation d’un contacteur aval entre le variateur et le moteur nécessite l’inhibition du défaut coupure phase moteur.
Rattrapage automatique avec recherche de vitesse (“reprise à la volée”)
Permet le redémarrage du moteur sans à-coup de vitesse après l’un des événements suivants si l’ordre de marche est maintenu :
> Coupure réseau ou simple mise hors tension.
> Remise à zéro des défauts ou redémarrage automatique.
> Arrêt roue libre.
A la disparition de l’événement, la vitesse effective du moteur est recherchée de manière à redémarrer sur rampe depuis cette vitesse jusqu’à la consigne. Le temps de recherche de vitesse peut atteindre 1 s selon l’écart initial.
Cette fonction est automatiquement inhibée si la logique de frein est configurée.
Elle est dédiée aux machines pour lesquelles la perte de vitesse du moteur est faible pendant le temps de coupure du réseau (machines à forte inertie), ventilateurs et pompes entraînés par un flux d’air à l’arrêt, …
Redémarrage automatique
Permet le redémarrage automatique après verrouillage du variateur sur défaut, si ce défaut a disparu et si les autres conditions de fonctionnement le permettent.
Ce redémarrage s’effectue par une série de tentatives automatiques séparées par des temps d’attente croissants, 1 s, 5 s, 10 s puis 1 mn pour les suivants.
La durée du processus de redémarrage est comprise entre 5 mn et un temps illimité.
Si le variateur n’a pas redémarré après le temps configuré, il se verrouille et la procédure est abandonnée jusqu’à la mise hors puis sous tension.
Les défauts qui permettent ce redémarrage sont :
> Surtension réseau.
> Surcharge thermique moteur.
> Surcharge thermique variateur.
> Surtension bus continu.
> Coupure d’une phase réseau.
> Défaut externe.
> Perte consigne 4-20 mA.
> Défaut bus CANopen.
> Défaut liaison série Modbus.
> Tension réseau trop basse. Pour ce défaut, la fonction est toujours active, même si elle n’est pas configurée.
Dans ces cas de défaut, le relais configuré en relais de sécurité reste enclenché si la fonction est configurée.
Cette fonction nécessite que la consigne de vitesse et le sens de marche soient maintenus.
Fonction dédiée aux machines ou installations fonctionnant en continu ou sans surveillance, et dont le redémarrage ne présente aucun danger, ni pour le matériel, ni pour le personnel.
Marche dégradée en cas de sous-tension
Le seuil de surveillance de la tension réseau est abaissé à 50 % de la tension moteur.
Dans ce cas, l’utilisation d’une inductance de ligne est obligatoire, et les performances du variateur ne sont plus garanties.
Relais de défaut, déverrouillage
Le relais de défaut est alimenté lorsque le variateur est sous tension et qu’il n’est pas en défaut.
Il comporte un contact “NO” et un contact “NC” à point commun.
Le déverrouillage du variateur après un défaut s’effectue par l’une des actions suivantes :
> Par mise hors tension jusqu’à extinction de la LED “sous tension” puis remise sous tension du variateur.
> Par une entrée logique à affecter à la fonction “Remise à zéro des défauts”.
> Par la fonction “Redémarrage automatique”, si celle-ci est configurée.
Remise à zéro du temps de fonctionnement
Le temps de fonctionnement du variateur peut être réinitialisé à zéro.
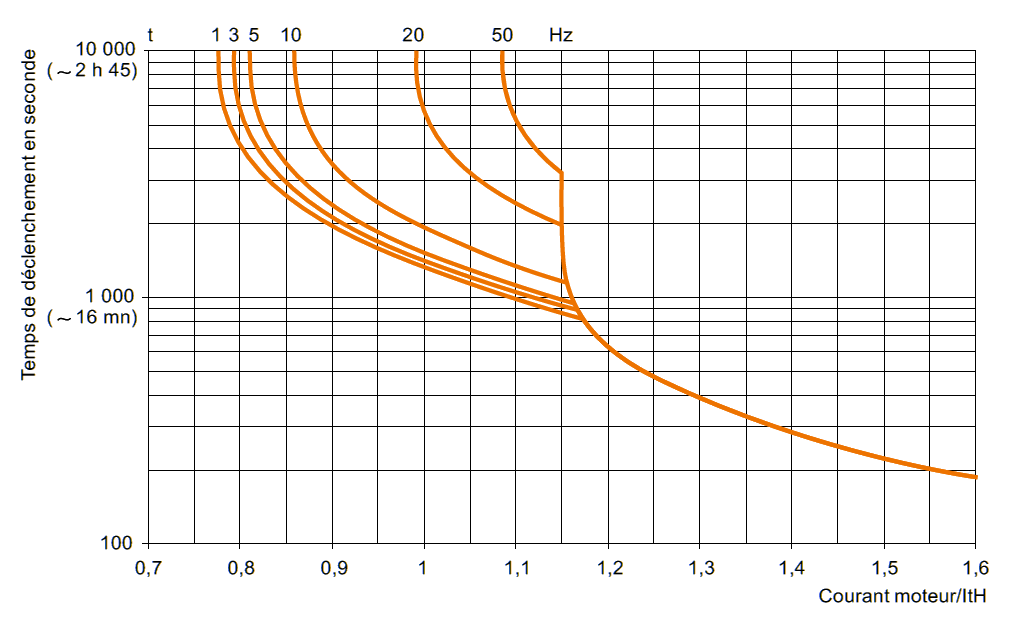
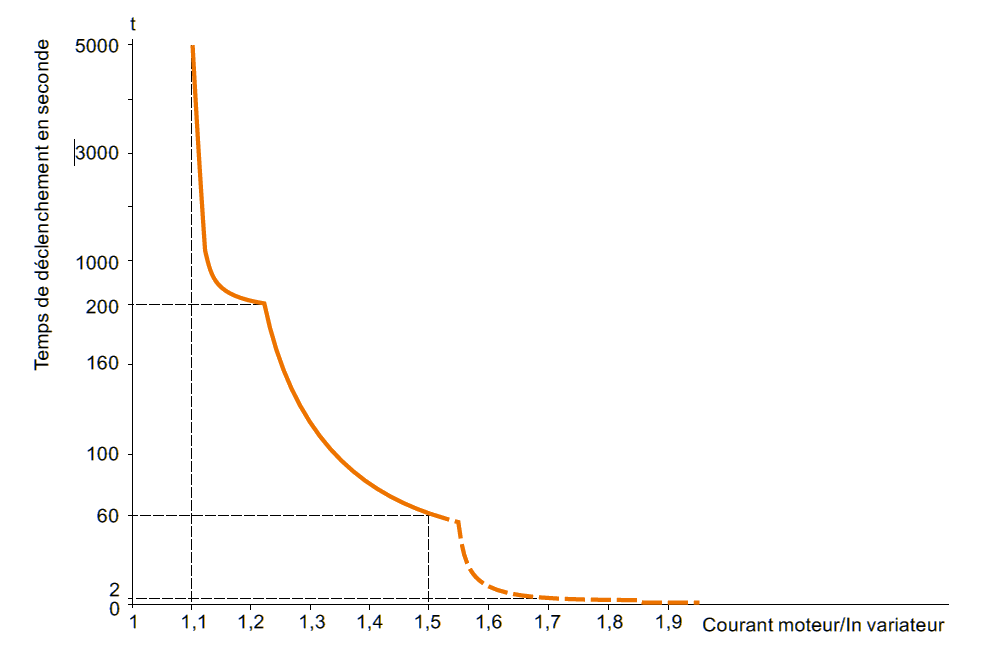
Protection thermique du moteur
La protection thermique indirecte du moteur se fait par calcul permanent de son échauffement théorique.
La protection thermique est réglable de 0,2 à 1,5 fois le courant nominal du variateur.
Fonction dédiée à toutes les applications avec moteur auto ventilé.
Courbes de protection thermique du moteur
Protection thermique du variateur
La protection thermique du variateur est assurée, par sonde CTP fixée sur le radiateur ou intégrée au module de puissance, en cas de mauvaise ventilation ou de température ambiante excessive.
Provoque le verrouillage du variateur sur défaut.
Courbe de protection thermique du variateur
Configuration des relais R1/R2
Les états suivants sont signalés par la mise sous tension du relais :
> Variateur en défaut.
> Variateur en marche.
> Seuil de fréquence atteint.
> Grande vitesse atteinte.
> Seuil de courant atteint.
> Consigne de fréquence atteinte.
> Seuil thermique moteur atteint.
> Logique de frein (R2 seulement).
Sorties analogiques AOC/AOV
La même information est disponible sur les sorties analogiques AOC et AOV.
Les affectations possibles sont les suivantes :
> Courant moteur.
> Fréquence moteur.
> Couple moteur.
> Puissance délivrée par le variateur.
> Variateur en défaut.
> Seuil de fréquence atteint.
> Grande vitesse atteinte.
> Seuil de courant atteint.
> Consigne de fréquence atteinte.
> Seuil thermique moteur atteint.
> Logique de frein.
Le réglage des sorties analogiques AOC/AOV permet de modifier les caractéristiques de la sortie analogique en courant AOC ou en tension AOV.
AOC : réglable en 0-20 mA ou 4-20 mA.
AOV : réglable en 0-10 V.
Sauvegarde et rappel de la configuration
Il est possible de sauvegarder une configuration. Cette fonction permet la mémorisation d’une configuration du variateur en supplément de la configuration courante.
Le rappel de cette configuration efface la configuration courante.
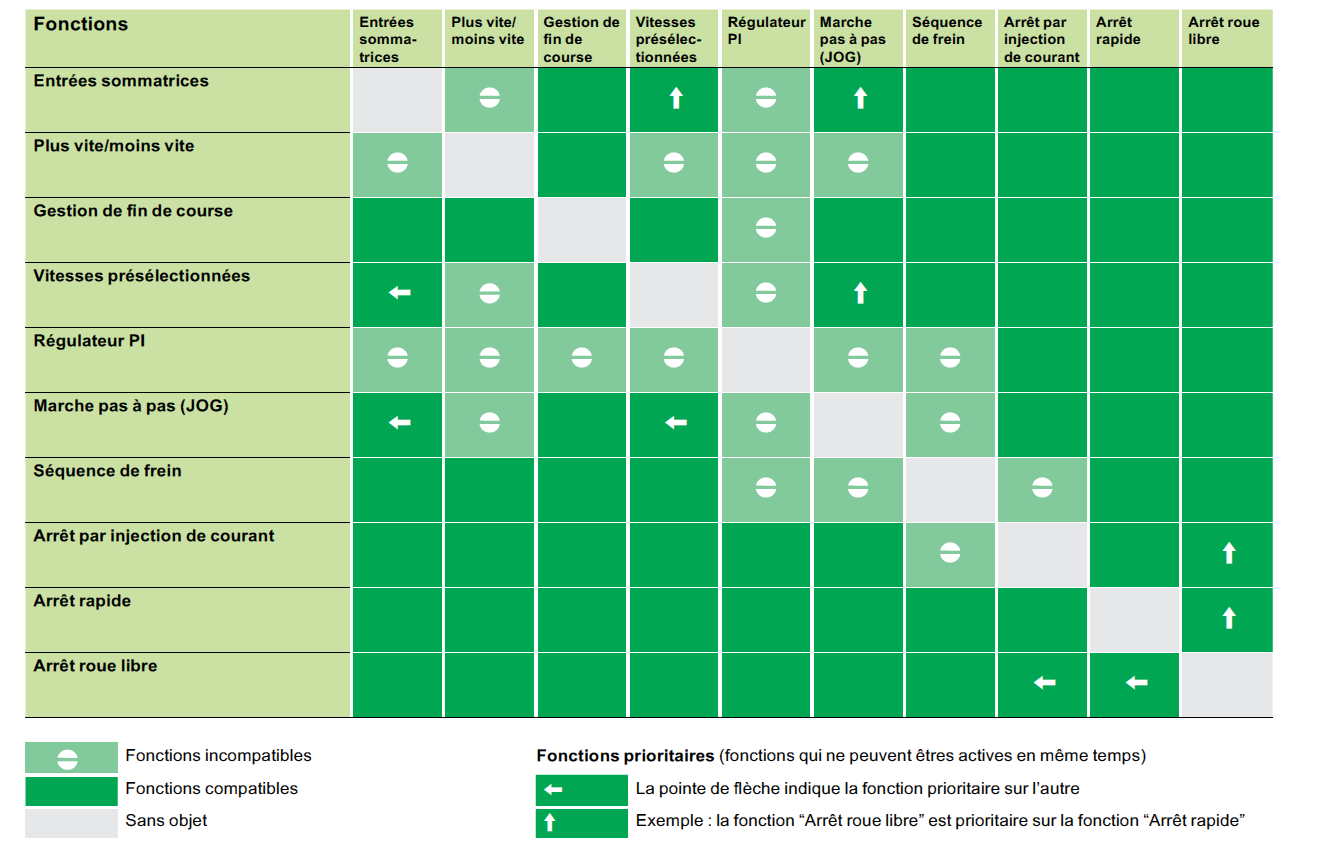
Entrées et sorties configurables
Les fonctions qui ne sont pas listées dans ce tableau ne font l’objet d’aucune incompatibilité.
Les fonctions d’arrêt sont prioritaires sur les ordres de marche.
Le choix des fonctions est limité :
> Par le nombre d’entrées et de sorties du variateur.
> Par l’incompatibilité de certaines fonctions entre elles.