



Lexium 28
Lexium 28 : servo-variateur
Schneider Electric, propose dans la gamme de ses contrôleurs de commande de mouvement le servo-variateur Lexium 28 associé au moteur BCH2 qui est adaptée aux machines compactes.
Le bundle variateur Lexium 28 et moteur BCH2 s’adapte à une large gamme d’applications de commande de mouvement, notamment pour :
– Le travail des matériaux (machines multi-axes, machines à découper, etc.).
– La manutention (convoyage, palettisation, emmagasinage, etc.).
– Les chaînes d’assemblage (serrage, etc.).
– L’emballage.
– L’impression.
– L’enroulement et le déroulement.
– …

En bref
Le servo-variateur offre une puissance de 50 W à 4,5 kW. Il propose en standard plusieurs E/S configurables pour une adaptation aux applications avec différentes interfaces de commande pour une intégration simplifiée suivant les différents niveaux d’architecture, notamment :
– Une interface de pilotage par train d’impulsions pour une connexion facile à des contrôleurs sans bus de terrain.
– Un port CANopen / CANmotion, pour une performance augmentée des automatismes.
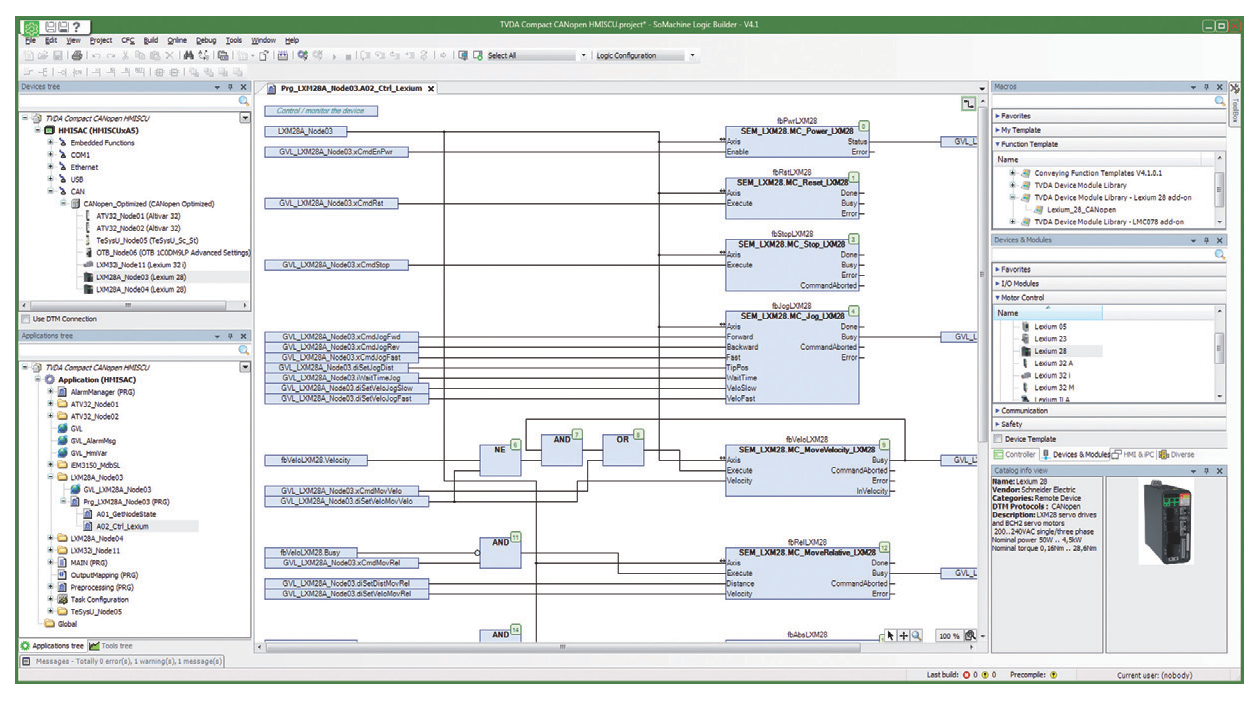
Le Lexium 28 est paramétré et mis en service avec le logiciel SoMove (ou SoMachine) qui facilite la configuration des équipements de commande (démarrage / paramétrage / maintenance).
Il dispose par ailleurs de fonctions de vitesse et de commande de couple ainsi que d’un algorithme de réglage automatique intégré (autotuning) qui propose 3 niveaux de réglage :
> Automatique.
> Semi-automatique et expert.
Il intègre également en standard une entrée dédiée de sécurité : « Safe Torque Off (STO) ». Cette fonction permet d’utiliser le variateur dans des solutions de sécurité de niveau SIL 2 / PL d (SIL: niveau d’intégrité de sécurité, PL: niveau de performance).
La gamme propose un ensemble complet d’accessoires, tels que les filtres CEM, les résistances de freinage et différentes options pour faciliter l’installation et la mise en service.
Vue d’ensemble
Les asservissements prédéfinis – combinaisons étudiées de servo-variateur -> Lexium 28 / servo moteur BCH2 sont optimisés pour une intégration aisée dans la machine et une mise en service simple.
Ils sont caractérisés par des interfaces normalisées, une fonction de sécurité embarquée et un partage du bus continu.
Le système propose :
– Autoréglage et identification du moteur.
– Bibliothèque de commandes de mouvement PLC open.
– Fonction de sécurité embarquée sur le variateur : “STO” (arrêt sécurisé du couple).
– Éco énergétique grâce au partage du bus continu.
– Interface pour bus de terrain standard CANopen / CANmotion.
– Interfaces d’entrée de train d’impulsions (PTI) et de sortie de train d’impulsions (PTO).
– Interface d’entrées logiques pour commander de simples mouvements directement par le servo-variateur : mode séquence de positions.
– Interface d’entrées analogiques +/-10 V pour mode contrôle de vitesse.
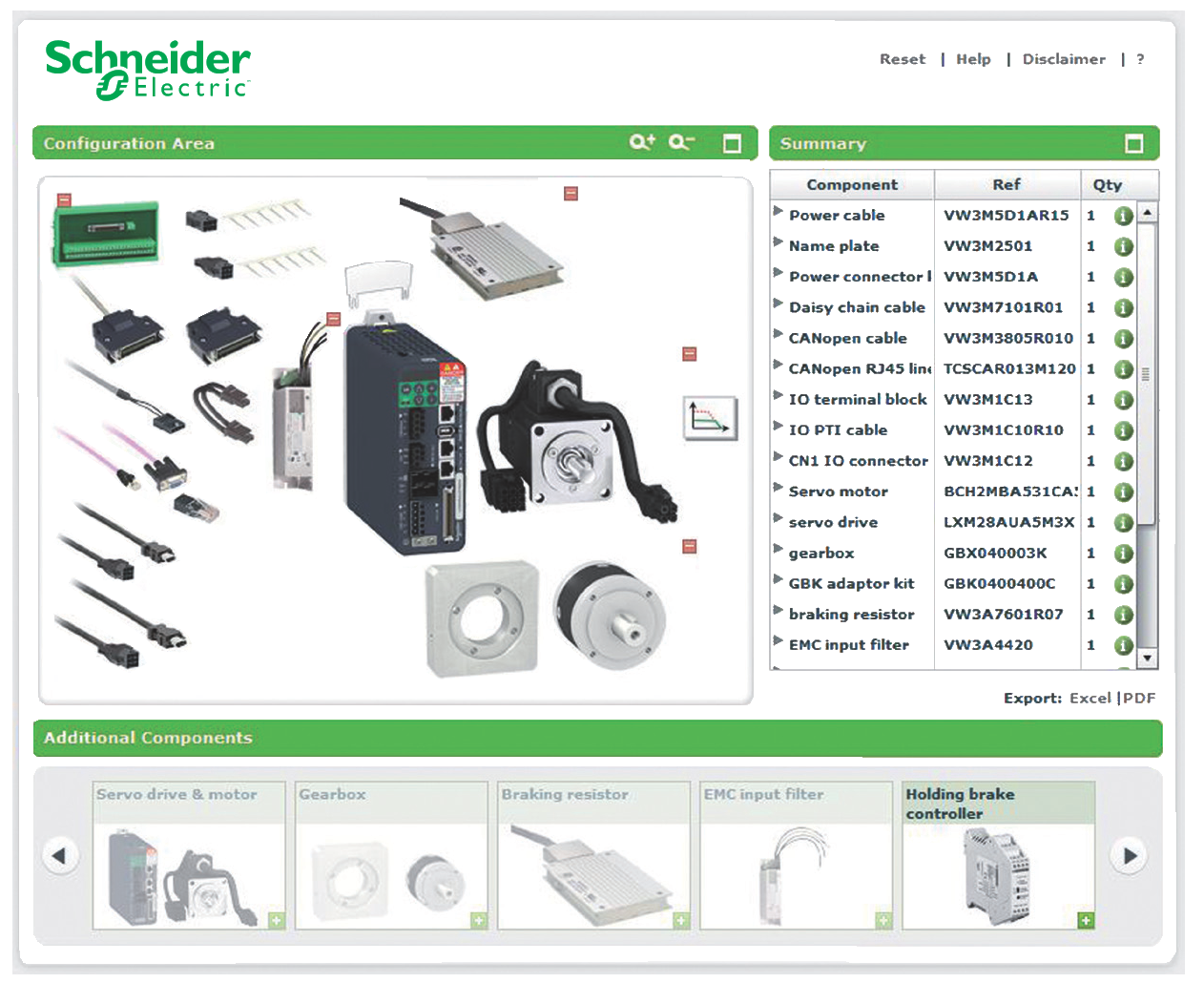
Configurateur en ligne
Servo-variateurs Lexium 28 combinés aux servomoteurs BCH2 et accessoires : des associations à créer avec le configurateur en ligne. (également disponible en applications pour appareils mobiles).
Servo-variateurs et servomoteurs
– Les associations servomoteurs / servo-variateurs sont basées sur la classe de puissance : le servomoteur et le servo-variateur ont chacun la même classe de puissance.
– La combinaison d’un servo-variateur avec un servomoteur est destinée à couvrir une puissance nominale comprise entre 0,05 kW et 4,5 kW avec une tension d’alimentation secteur de 200 à 240 V.
– Les servo-variateurs Lexium 28 sont livrés sans filtre CEM, l’immunité électromagnétique étant obtenue avec un filtre CEM additionnel.
– Ils ont un degré de protection IP 20.
– Les moteurs BCH2 fournissent un couple nominal entre 0,16 Nm et 28,6 Nm et une vitesse nominale entre 1 500 et 3 000 tr/min, selon modèle. Ils conviennent à des applications diverses en raison des différents niveaux d’inertie du moteur proposés.
Fonctions des servo-variateurs Lexium 28
– Identification automatique du moteur par le servo-variateur : les caractéristiques techniques du moteur sont fournies au variateur par l’intermédiaire du câble de raccordement codeur.
– Filtrage : fonction anti-vibration pour la suppression des fréquences de résonance du train de puissance raccordé à la masse mobile de l’application.
– Fonctions de contrôle :
> Contrôle de l’état, contrôle des entrées/sorties.
> Fonction d’historique pour mémoriser (dans le variateur) les messages d’alarme et d’avertissement.
> Fonction de remise à zéro des alarmes et avertissements.
> Contrôle de la commande en boucle fermée.
– Commande de mouvement avec interface d’entrée logique directement dans le servo-variateur :
> Mode de positionnement relatif ou absolu.
> Mode vitesse.
> Mode contrôle de couple.
> Mode séquence de positions : une séquence comportant jusqu’à 32 mouvements, contrôlée par une interface d’entrées logiques.
Le servo variateur Lexium 28 est piloté par l’intermédiaire d’une interface de commande par bus de terrain CANopen/CANmotion, interface “CN4 CAN”.
Il peut aussi être piloté par le biais de nombreux signaux logiques et analogiques, accessibles par l’interface “CN1 I/O” :
> 2 entrées logiques pour capture de position haute performance.
> 8 entrées logiques.
> 5 sorties logiques.
> 2 entrées analogiques.
> 2 sorties analogiques.
> 1 entrée logique pour la fonction de sécurité STO (arrêt sécurisé du couple).
Fonctions de variateur activées par logiciel de mise en service ou directement via l’interface IHM
– Mode jog : mouvement à vitesse constante.
– “Réglage facile” mode de réglage à une touche : cette fonction permet d’optimiser les performances de l’application.
– 2 fonctions de réglage supplémentaires, activées par le logiciel de mise en service SoMove ou via l’interface IHM :
> “Réglage de confort” avec valeurs prédéfinies pour différents systèmes mécaniques tels qu’axes de broche (par ex. axes portiques), courroie transporteuse, axes verticaux (par ex. axes Cantilever).
> “Réglage auto-adaptatif”.
Modes opératoires pour le Lexium 28 via interface PTI / PTO
Le mouvement des variateurs Lexium 28 peut être piloté par un contrôleur machine (contrôleur logique Modicon M221) avec interface de sortie de train d’impulsions (PTO) ou l’interface PTO d’un autre servo-variateur (Lexium 28).
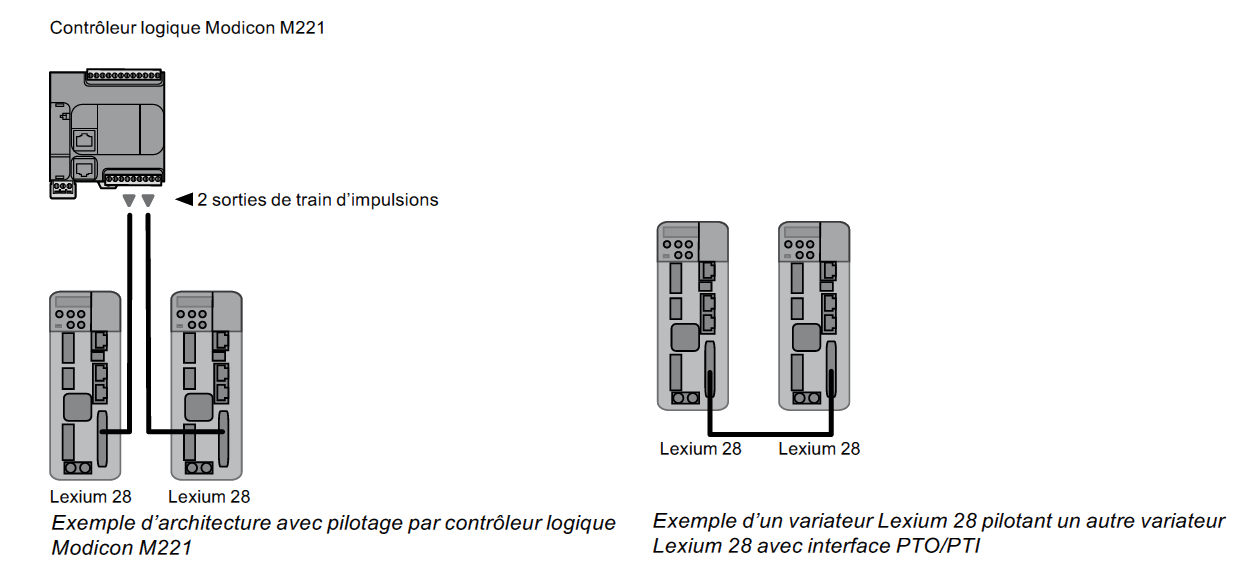
L’entrée de train d’impulsions (PTI) correspondante du variateur Lexium 28 est ensuite électriquement raccordée à l’interface d’entrées/sorties CN1.
Modes opératoires pour le Lexium 28 via bus de terrain CANopen et CANmotion
Les modes opératoires suivants sont disponibles :
– Prise d’origine (conformément au profil fonctionnel CiA DSP 402).
– Mode point à point (conformément au profil fonctionnel CiA DSP 402).
– Mode réducteur de position.
– Mode position synchrone cyclique, mode vitesse synchrone cyclique, mode couple synchrone cyclique (avec interface CANmotion).
Fonction de sécurité embarquée STO
En intégrant dans les variateur la fonction STO (arrêt sécurisé du couple), cette fonction satisfait aux exigences SIL 2 selon CEI 61800-5-2 / CEI 62061 / CEI 61508 et jusqu’à la catégorie 3 et PL d selon EN ISO 13849-1, ce qui simplifie la mise en œuvre des installations exigeant des équipements de sécurité complexes et améliore les performances pendant les opérations de maintenance.
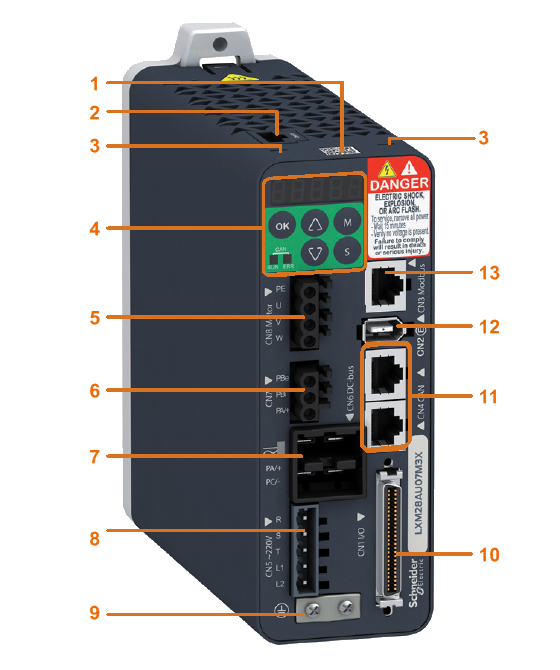
Description
Sur le haut du variateur :
(1) Code QR : accès aux données techniques détaillées, au guide de câblage et au guide d’installation.
(2) Bornier débrochable (à ressort) pour fonction STO (repéré CN9).
(3) Emplacement pour plaque signalétique de l’application.
En face avant du variateur :
(4) Interface IHM, afficheur 7 segments, 5 touches (OK, mode, réglage, augmenter valeur, diminuer valeur) et témoins lumineux des états du variateur.
(5) Bornier débrochable (à ressort) pour le raccordement du moteur (repéré CN8 Motor)
(6) Bornier débrochable (à ressort) pour le raccordement de la résistance de freinage (repéré CN7).
(7) Connecteur de bus continu avec témoin d’état “DC-bus charged” (Bus continu chargé) (repéré CN6 DC-bus).
(8) Bornier débrochable (à ressort), 5 bornes (R, S, T, L1, L2) pour le raccordement de l’alimentation 230 V AC (repéré CN5 AC 230 V).
(9) Connecteur de terre de protection.
(10) Connecteur d’interface d’entrées/sorties (repéré CN1 I/O).
(11) 2 connecteurs RJ 45 pour le raccordement du bus de terrain CANopen/CANmotion (repéré CN4 CAN).
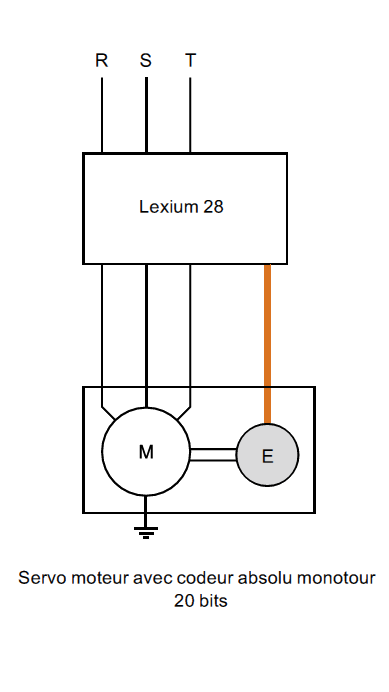
(12) Connecteur pour codeur moteur : codeur absolu mono tour 20 bits, type ServoSense R (repéré CN2 ).
(13) Connecteur RJ 45 pour le raccordement de la liaison série Modbus (repéré CN3 Modbus).
Logiciel de mise en service SoMove
Le logiciel de mise en service SoMove est utilisé sur les servo-variateurs Lexium 28 pour configurer, régler et mettre au point le variateur, et d’en assurer la maintenance.
La configuration des servo-variateurs Lexium 28 peut s’effectuer avec le cordon TCSMCNAM3M002P, entre le PC et le Lexium 28, sur l’interface CN3.

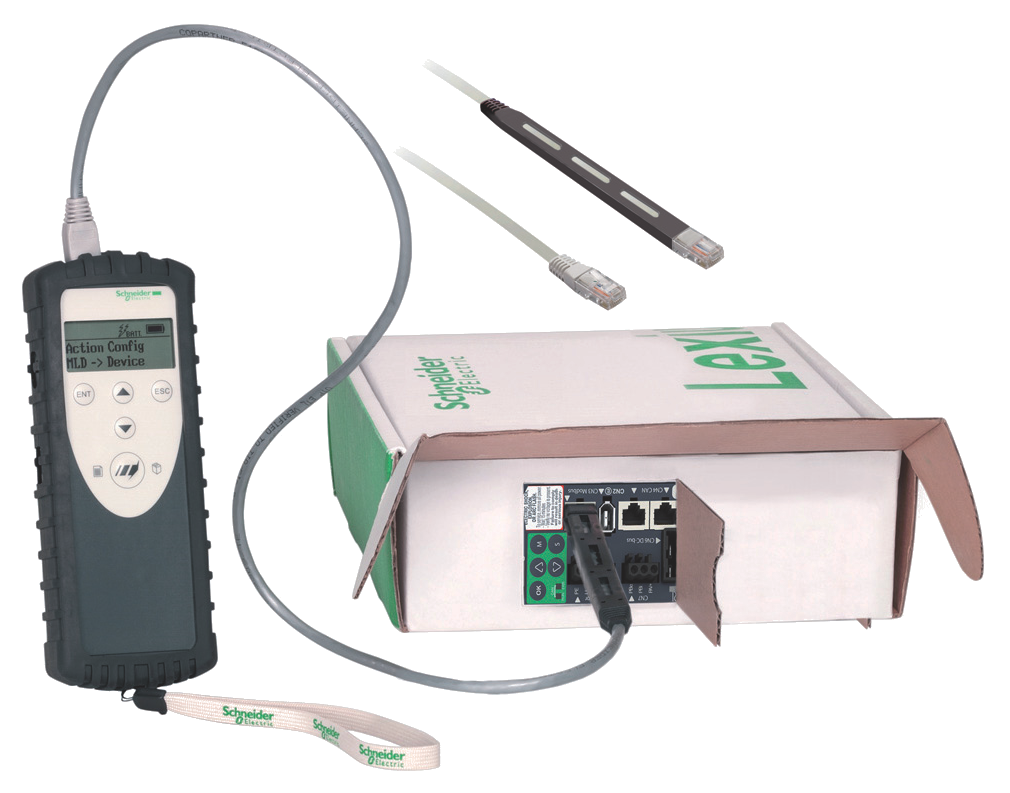
Outil de configuration Multi-Loader
L’outil Multi-loader permet de copier plusieurs configurations depuis un PC ou un servo-variateur Lexium 28 et de les charger sur un autre servo-variateur.
Cette opération ne peut être réalisée lorsque les servo-variateurs Lexium 28 sont hors tension.
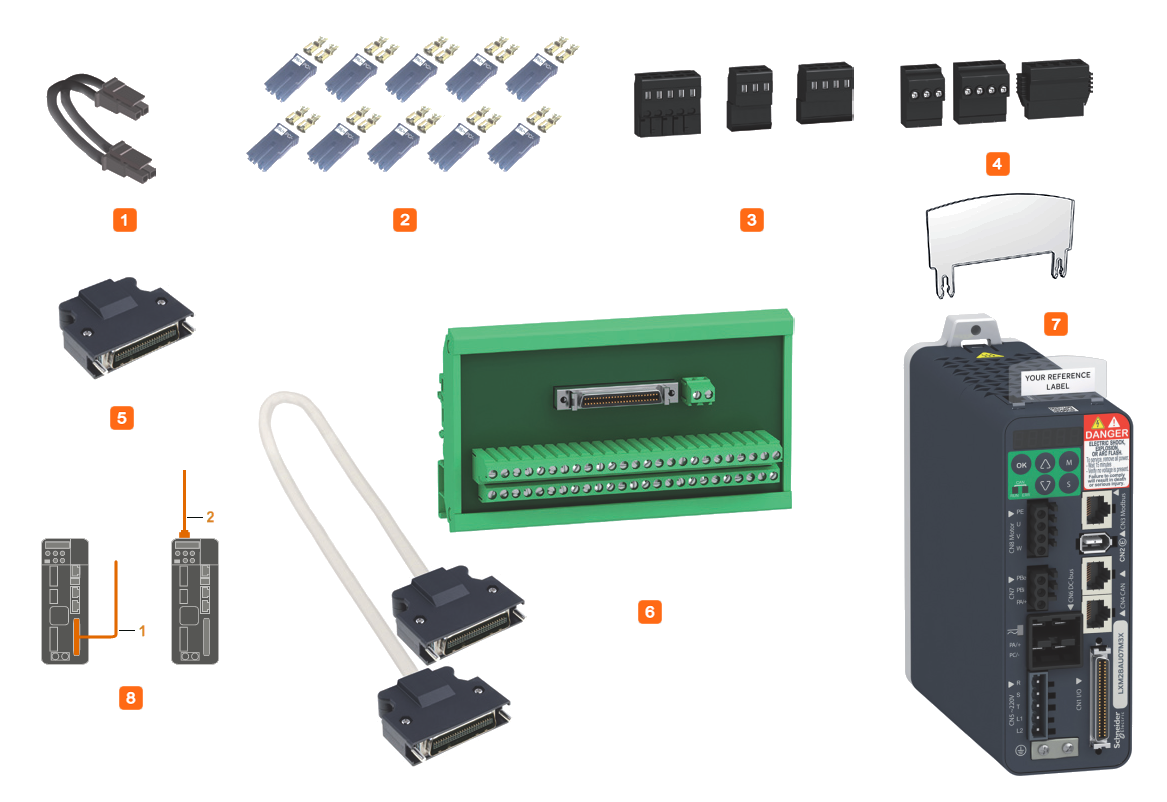
Accessoires de raccordement
(1) Cordon de raccordement en chaînage du bus continu.
(2) Kit de connecteur de bus continu.
(3) Jeux de connecteurs de rechange de 50 W à 1,5 kW.
> 3 connecteurs : 1 pour l’interface CN5, 1 pour CN7, et 1 pour CN8.
(4) Jeux de connecteurs de rechange de 2 kW à 4,5 kW
> 3 connecteurs : 1 pour l’interface CN5, 1 pour CN7, et 1 pour CN8.
(5) Connecteurs d’entrées/sorties : Connecteur SUB-D 50 broches pour interface d’entrées/sorties CN1.
(6) Module bornier d’entrées/sorties : Ensemble Bornier + cordon composé de 2 connecteurs SUB-D 50 broches type VW3M1C12, et d’un câble de 0,5 m, pour raccorder l’interface d’entrées/sorties CN1.
(7) Etiquette signalétique de l’application.
(8) Cordons de raccordement PTI d’entrée/sortie (1/2/3m) :
> (repère 1) Équipés d’un connecteur SUB-D 50 broches pour le raccordement à l’interface CN1 (côté variateur), et d’une extrémité ouverte (côté contrôleur).
> (repère 2) Équipés d’un connecteur Molex 4 broches pour le raccordement à l’interface CN9 (côté variateur), et d’une extrémité ouverte (côté contrôleur).
Bus de terrain CANopen et CANmotion
Le bus de terrain CANopen est spécialement conçu pour s’intégrer dans les systèmes de commande.
Il assure ouverture et interopérabilité à des équipements divers (variateurs, départs-moteurs, capteurs intelligents, etc.).
Une connectivité CANopen à plusieurs niveaux permet de réduire les coûts et d’optimiser la création du système de commande.
Les avantages sont les suivants :
> Temps de câblage réduit.
> Meilleure fiabilité de la charge.
> Flexibilité lors d’ajout ou de suppression d’équipement.
Raccordement
Les servo-variateurs Lexium 28 sont raccordés au bus de terrain CANopen/CANmotion via 2 connecteurs RJ 45, ce qui permet d’avoir une solution optimisée pour le raccordement en chaînage au bus de terrain CANopen.
Le même port de communication donne accès au bus de terrain CANopen ou CANmotion.

La communication permet d’accéder aux fonctions de configuration, de réglage, de pilotage et de surveillance du servo-variateur.
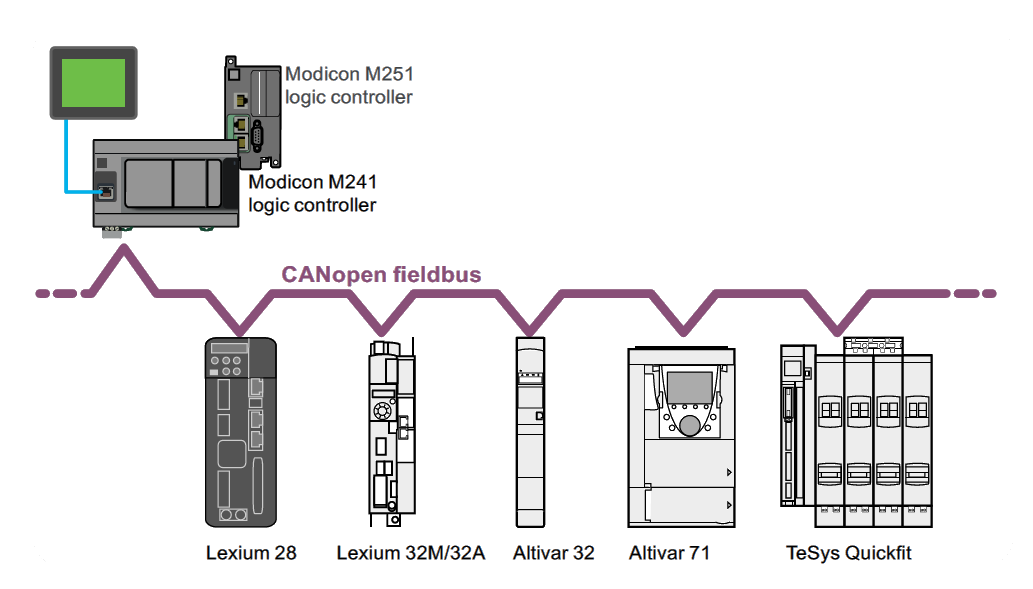
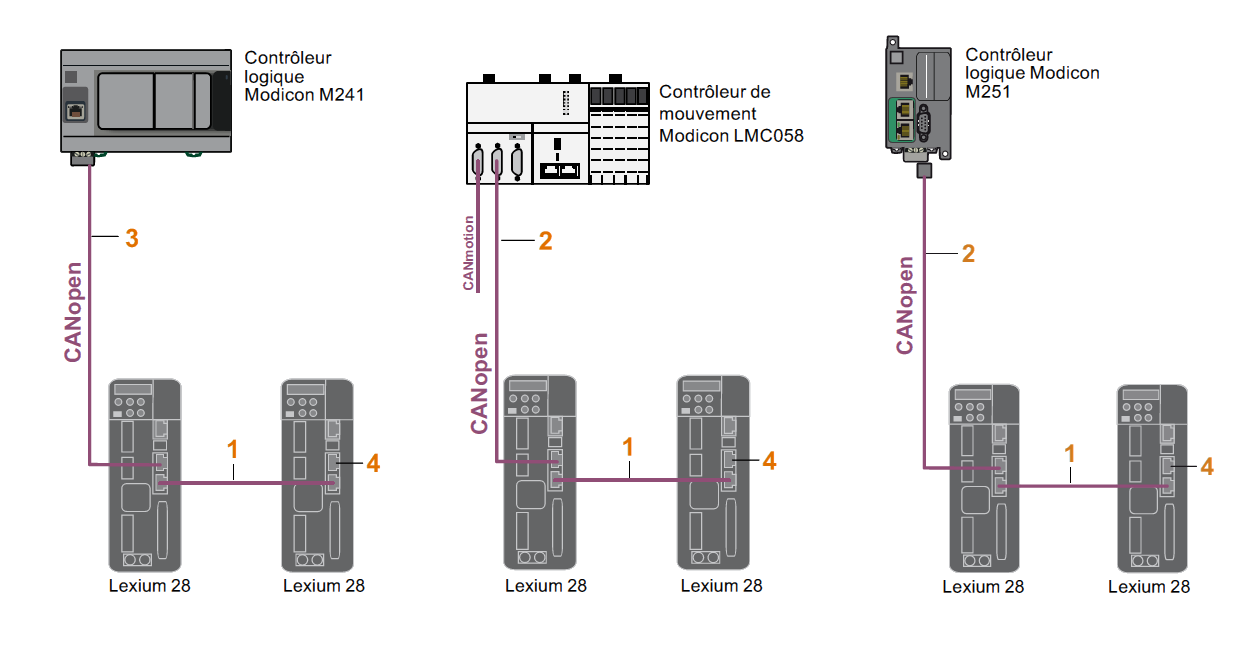
Exemples d’architecture avec contrôle par contrôleurs logiques Modicon M241/M251 ou contrôleur de mouvement LMC058
(1) Cordons CANopen : Équipés avec 2 connecteurs RJ 45
(2) Cordons CANopen : Équipés avec 1 connecteur SUD-D femelle 9 contacts à terminaison de ligne intégrée et 1 connecteur RJ 45.
(3) > Câbles CANopen : Câbles standard, marquage CE , faible dégagement de fumée, sans halogène, non-propagateur de flamme (CEI 60332-1).
> Câbles CANopen : Certification UL, marquage CE, non-propagateur de flamme (CEI 60332-2).
> Câbles CANopen : Câbles pour ambiance sévère (*) ou installation mobile, marquage CE, faible dégagement de fumée, sans halogène, non- propagateur de flamme (CEI 60332-1)
(*) Ambiance sévère :
– Tenue aux hydrocarbures, huiles industrielles, détergents, éclats de soudure,
– Humidité relative jusqu’à 100 %,
– Atmosphère saline,
– Fortes fluctuations de température,
– Température d’utilisation comprise entre – 10 °C et + 70 °C
(4) Terminaison de ligne CANopen pour connecteur RJ 45 : 120 Ω.
Résistances de freinage pour servo-variateurs
Résistance de freinage interne
Une résistance de freinage est intégrée au servo-variateur pour absorber l’énergie de freinage.
Si la tension du bus continu interne au servo-variateur dépasse une valeur donnée, cette résistance de freinage est activée. L’énergie ainsi récupérée est transformée en chaleur par la résistance de freinage.
Elle permet d’avoir un couple de freinage transitoire maximal.
Résistance de freinage externe
Lorsque le servomoteur doit être fréquemment freiné, il est nécessaire d’utiliser une résistance de freinage externe pour évacuer l’excédent d’énergie de freinage.
Dans ce cas, la résistance de freinage interne doit être désactivée.
Plusieurs résistances de freinage externes peuvent être raccordées en parallèle. Le servo-variateur surveille la puissance dissipée dans la résistance de freinage.
Le degré de protection du boîtier est IP 65 pour les résistances de freinage VW3A7601R.. à VW3A7607R.. et IP 20 pour les résistances de freinage VW3A770p.
La température d’utilisation autour de l’unité peut être comprise entre 0 et + 50 °C.
Applications : machines à forte inertie, charges entraînantes, machines à cycles rapides…
Filtres CEM
Les servo-variateurs Lexium 28 doivent être munis de filtres d’entrée externe pour satisfaire à la norme CEM applicable aux “produits” d’entraînement électrique de puissance à vitesse variable CEI/EN 61800-3, édition 2, catégorie C3 en environnement 2, ainsi qu’à la directive européenne sur la compatibilité électromagnétique (CEM).
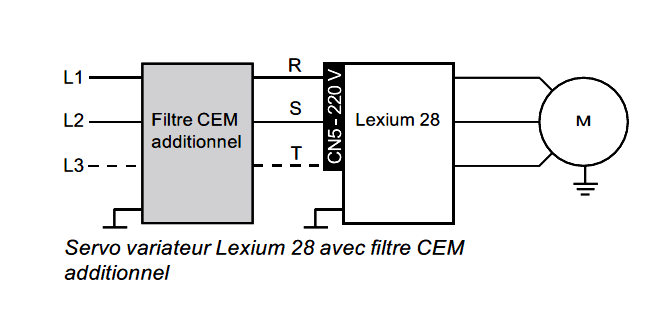
Applications
Les filtres CEM additionnels sont montés à côté de l’équipement. Ils sont munis de trous taraudés pour la fixation en armoire.
La longueur maximale de câble du servomoteur selon la norme CEI/EN 61800-3 catégorie C3 (1) en environnement 2 est de 20 m.

Utilisation en fonction du type de réseau
L’utilisation de filtres CEM additionnels (ou intégrés) n’est possible que sur les réseaux de type TN (mise au neutre) ou TT (neutre à la terre).
Il est impossible d’utiliser les servo-variateurs Lexium 28 sur un réseau de type IT (neutre impédant ou isolé).
La norme CEI/EN 61800-3, annexe D2.1, indique que sur les réseaux IT, les filtres peuvent rendre aléatoire le fonctionnement des contrôleurs d’isolement.
Lorsqu’une machine doit être installée sur un réseau IT, un transformateur d’isolement doit absolument être inséré afin de reconstituer, côté secondaire, un réseau de type TT.
Départs-moteurs
Les associations d’un disjoncteur, d’un contacteur, et d’un servo-variateur Lexium 28 permettent de réaliser un départ-moteur complet avec :
– Un disjoncteur GV2. qui assure la protection contre les courts-circuits, et le sectionnement.
– Un contacteur LC1 qui assure la mise sous tension et la gestion des sécurités.
– Le servo-variateur Lexium 28 assure le pilotage du servomoteur, la protection contre les courts-circuits entre le servo-variateur et le servomoteur, et la protection du câble moteur contre les surcharges. La protection contre les surcharges est assurée par la protection thermique moteur du servo-variateur.
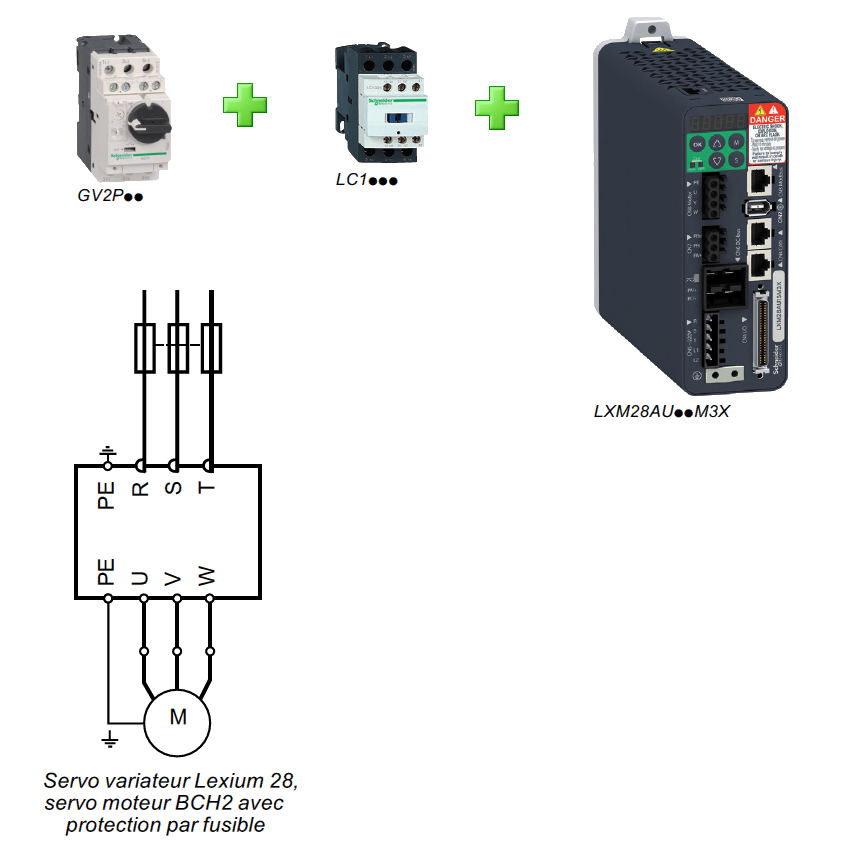
Exemple de schéma :
Servomoteurs BCH2
Les moteurs BCH2 sont des servomoteurs synchrones, alimentés en courant alternatif.
Ils sont équipés en standard d’un codeur absolu mono tour à haute résolution (20 bits).
Ce codeur mesure la position angulaire du moteur à la précision de ± 2,6 arc minutes.
Le codeur assure les fonctions suivantes :
> Fournir la position absolue du moteur de manière à réaliser la synchronisation du flux.
> Mesurer la vitesse du servomoteur via le servo-variateur (cette information est utilisée par le régulateur de vitesse du servo-variateur).
> Transmettre des données entre servomoteurs et servo-variateurs, y compris l’identification automatique du moteur au démarrage du servo-variateur.
Les moteurs BCH2 sont disponibles en six tailles de bride : 40 mm, 60 mm, 80 mm, 100 mm, 130 mm et 180 mm.
En fonction de la taille de bride, les moteurs BCH2 sont livrés soit avec :
– Des fils libres avec connecteurs,
– Des connecteurs MIL.
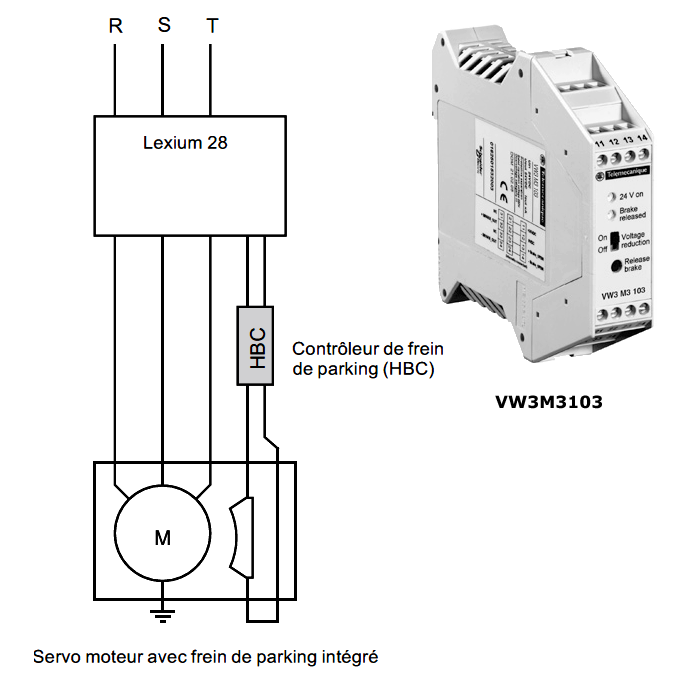
Les moteurs BCH2 existent avec un frein de parking (pas utiliser le frein de parking comme frein dynamique pour décélérer).
– Types d’inertie de moteur :
> Inertie basse : puissance comprise entre 0,2 kW et 1 kW, adaptée aux secteurs du textile et de l’emballage.
> Inertie moyenne : puissance comprise entre 0,05 kW et 4,5 kW, adaptée au travail des matériaux et aux machines-outils.
> Inertie haute : puissance de 0,75 kW, adaptée au travail des métaux et à l’impression.
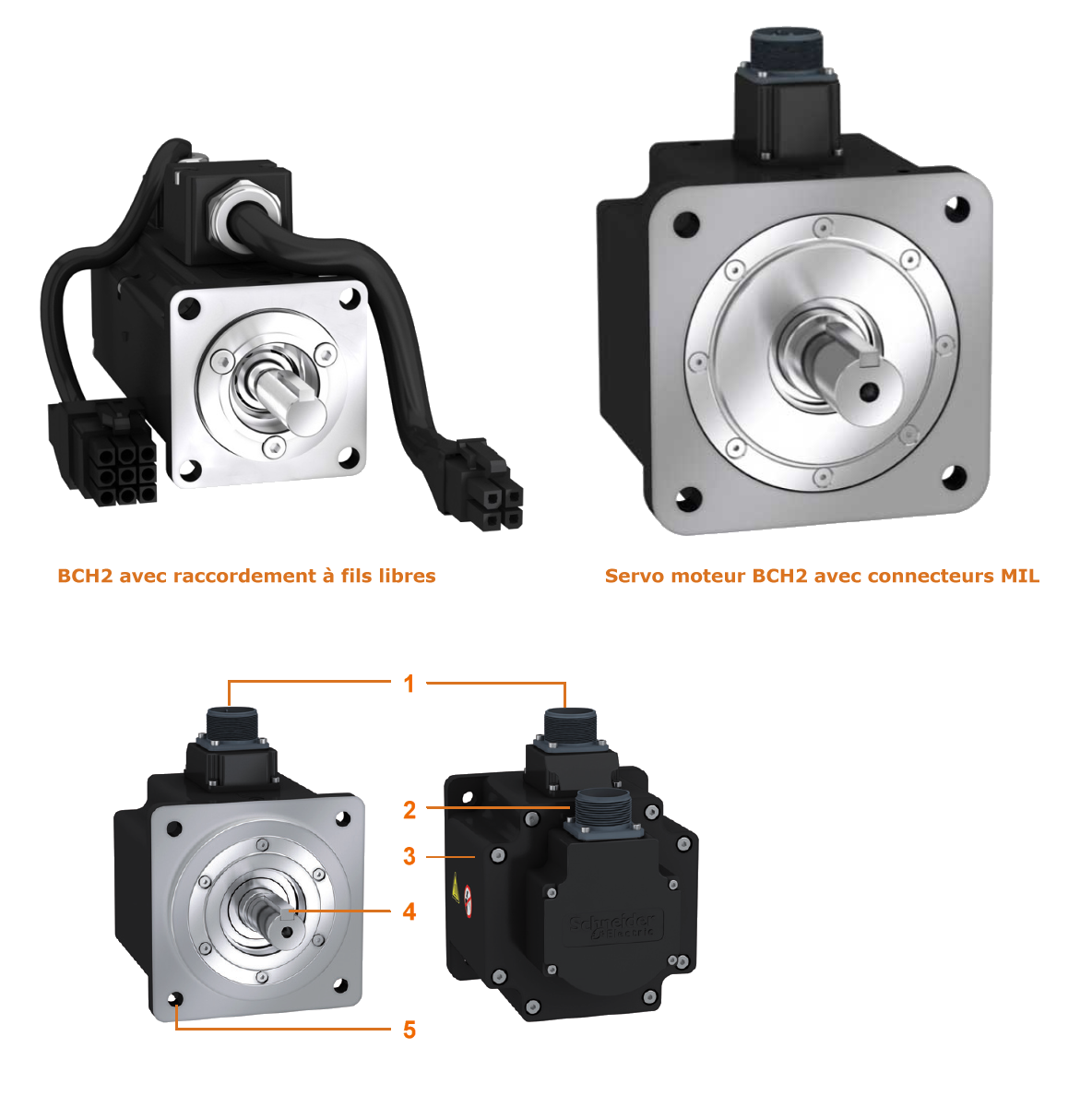
Description
Les servomoteurs BCH2, constitués d’un stator triphasé et d’un rotor à aimants permanents comprennent les éléments suivants :
(1) Connecteur pour le câble d’alimentation.
(2) Connecteur pour le câble de codeur.
(3) Boîtier à revêtement peint en noir opaque RAL 9005.
(4) Bout d’arbre lisse ou à clavette.
(5) Bride de fixation axiale 4 points.
Contrôleur de frein de parking
Si un servomoteur est équipé d’un frein de parking, il est nécessaire d’avoir une logique de contrôle appropriée (HBC, contrôleur de frein de parking), qui desserre le frein lorsque le servomoteur est alimenté en tension, et immobilise l’arbre du servomoteur lorsque celui-ci est stationnaire.
Le contrôleur de frein de parking amplifie le signal de contrôle du freinage (Sortie logique) transmis par le servo-variateur Lexium 28, de manière à désactiver rapidement le frein. Le contrôleur réduit ensuite ce signal de contrôle afin de diminuer la puissance dissipée par le frein de parking.
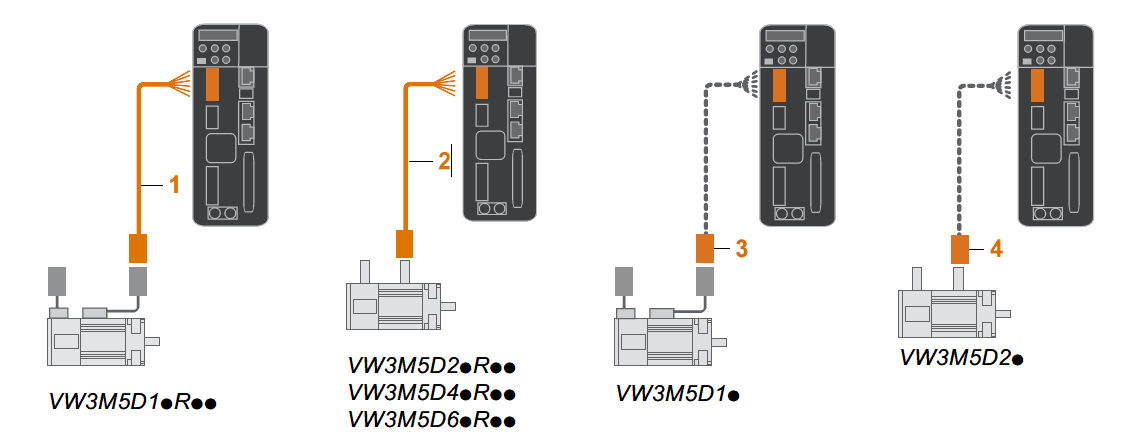
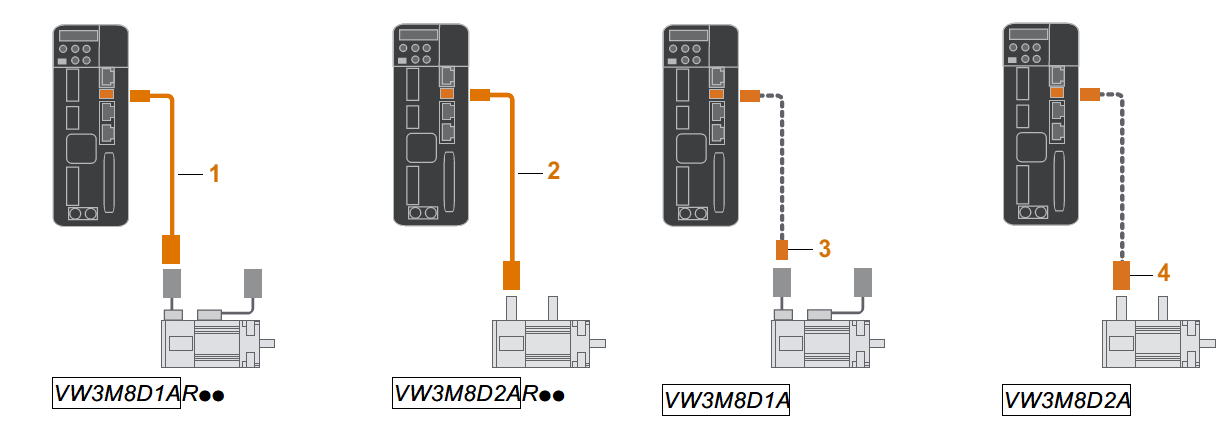
Cordons de raccordement
Cordons de raccordement puissance blindés pour moteurs BCH2 sans frein
(1) Équipés avec 1 connecteur rapide (côté servomoteur) et 1 extrémité ouverte (côté servo-variateur) : longueurs 1,5 m / 3 m / 5 m (4 x 0,82..1,0 mm²).
(2) Équipés d’un connecteur MIL (côté servomoteur) et 1 extrémité ouverte (côté servo-variateur) : longueurs 3 m / 5 m (4 x 1,3..1,5 mm², 4 x 3,3..4,0 mm², 4 x 6,0 mm²).
Cordons de raccordement puissance blindés pour moteurs BCH2 avec frein
(1) Équipés avec 1 connecteur rapide (côté servomoteur), et 1 extrémité ouverte (côté servo-variateur) : longueurs 3 m / 5 m (6 x 0,82..1,0 mm²).
(2) Équipés avec 1 connecteur MIL (côté servomoteur) et 1 extrémité à fils libres (côté servo-variateur) : longueurs 3 m / 5 m (6 x 1,3..1,5 mm², 6 x 3,3..4,0 mm², 6 x 6,0 mm²).
(3) Kits connecteurs de puissance moteur :
> Moteurs BCH2.B/.D/.F (taille de bride : 40/60/80 mm) avec raccordement à fils libres, sans frein.
> Moteurs BCH2.B/.D/.F (taille de bride : 40/60/80 mm) avec raccordement à fils libres, avec frein.
(4) Kits connecteurs MIL de puissance :
> Moteurs BCH2.H/.M (taille de bride : 100/130 mm) avec ou sans frein.
> Moteurs BCH2.R (taille de bride :180 mm) avec ou sans frein.
Cordons de codeur, kits connecteurs
(1) Équipés avec 1 connecteur à chaque extrémité : Pour moteurs BCH2.B/.D/.F, raccordement sur interface CN2 (1,5 m / 3 m).
(2) Équipés avec 1 connecteur MIL (côté servomoteur), et 1 connecteur Firewire (côté servo-variateur) : Pour BCH2.H/.M/.R, raccordement sur interface CN2 (3 m / 5 m).
(3) Kits connecteurs de codeur : Pour moteurs BCH2.B/.D/.F (bride : 40/60/80 mm) avec raccordement à fils libres.
(4) Kits connecteurs de codeur : Pour moteurs BCH2.H/.M/.R (bride : 100/130/180 mm) avec connecteur MIL.
Réducteurs planétaires
Schneider Electric propose d’utiliser les réducteurs planétaires GBX……K avec les servomoteurs de la gamme BCH2.
La commande de mouvement nécessite l’utilisation de réducteurs planétaires pour adapter les vitesses et les couples, tout en offrant la précision requise par l’application.
L’association des servomoteurs BCH2 avec les réducteurs planétaires GBX……K les mieux adaptés facilite le montage et la mise en œuvre.
Les réducteurs planétaires sont conçus pour des applications sans contrainte de jeu mécanique.
Ils sont équipés d’un arbre à clavette, sont lubrifiés à vie, et conformes au degré de protection IP 54.
Les réducteurs planétaires sont :
> Disponibles en quatre tailles (40 mm, 60 mm, 80 mm et 120 mm.
> Proposés dans dix rapports de réduction (3:1, 5:1, 8:1, 10:1, 12:1, 15:1, 20:1, 25:1, 32:1, et 40:1).
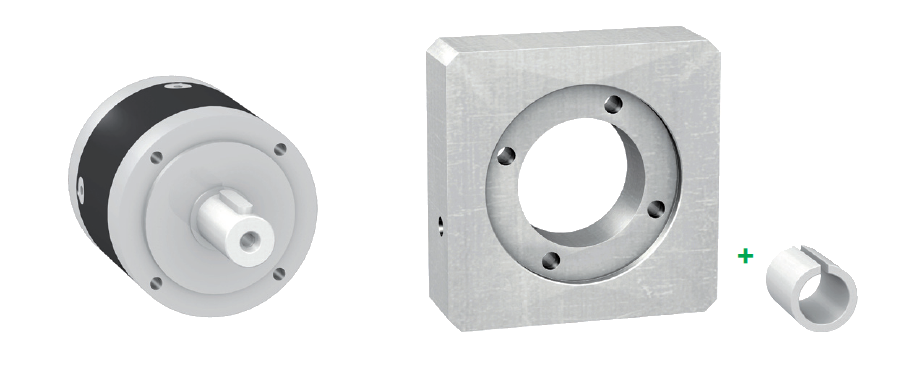
Un kit d’adaptation GBK……C est proposé pour assembler les servomoteurs BCH2 et les réducteurs planétaires GBX040…K à GBX120…K.
Le kit d’adaptation comprend :
> Une plaque d’adaptation.
> Un adaptateur pour bout d’arbre, selon le modèle (dépend de l’association servomoteur/réducteur planétaire).
> La visserie pour le montage de la plaque sur le réducteur planétaire.
> La visserie pour le montage du servomoteur.
Exemple de mise en œuvre
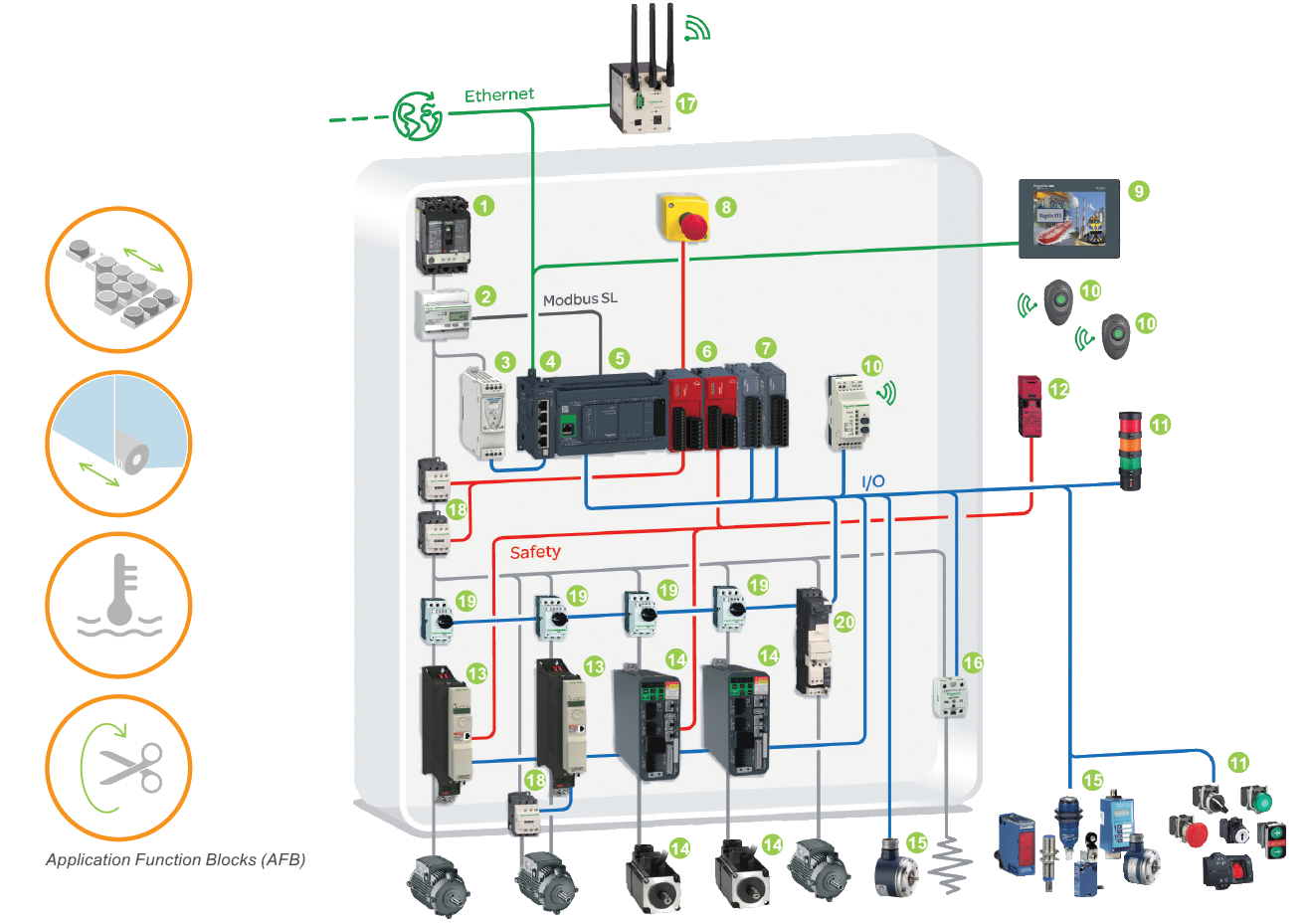
Contrôleurs logiques Modicon M241 / compacts / Logique câblée
1 Disjoncteur Compact NSX.
2 Compteur d’énergie IEM32.
3 Alimentation à découpage Phaseo.
4 Module switch Ethernet Modicon TM4.
5 Contrôleur logique Modicon M241.
6 Module de sécurité fonctionnelle Modicon TM3.
7 Module d’extension d’entrées/sorties Modicon TM3.
8 Arrêt d’urgence Harmony XALK.
9 IHM STO/STU Magelis.
10 Point d’accès configurable, bouton sans fil et sans pile Harmony XB5R.
11 Unités de contrôle et de signalisation Harmony XB4/XB5.
12 Interrupteur de sécurité Preventa XCS.
13 Variateur de vitesse Altivar 32.
14 Servo variateur Lexium 28, servo moteur BCH2.
15 Détecteur de proximité et détecteur photoélectrique, fin de course, codeur OsiSense.
16 Relais statique Zelio Relay.
17 Accès Ethernet sans fil ConneXium.
18 Contacteur et contacteur inverseur TeSys D.
19 Disjoncteur magnétique TeSys GV2L.
20 Démarreur direct /démarreur à 2 sens de marche TeSys GV2M/3P.
Vidéo sur Lexium 28 (en anglais)
